Pruning Parameterization With Bi-Level Optimization for Efficient Semantic Segmentation on the Edge
{kind=link}
Abstract
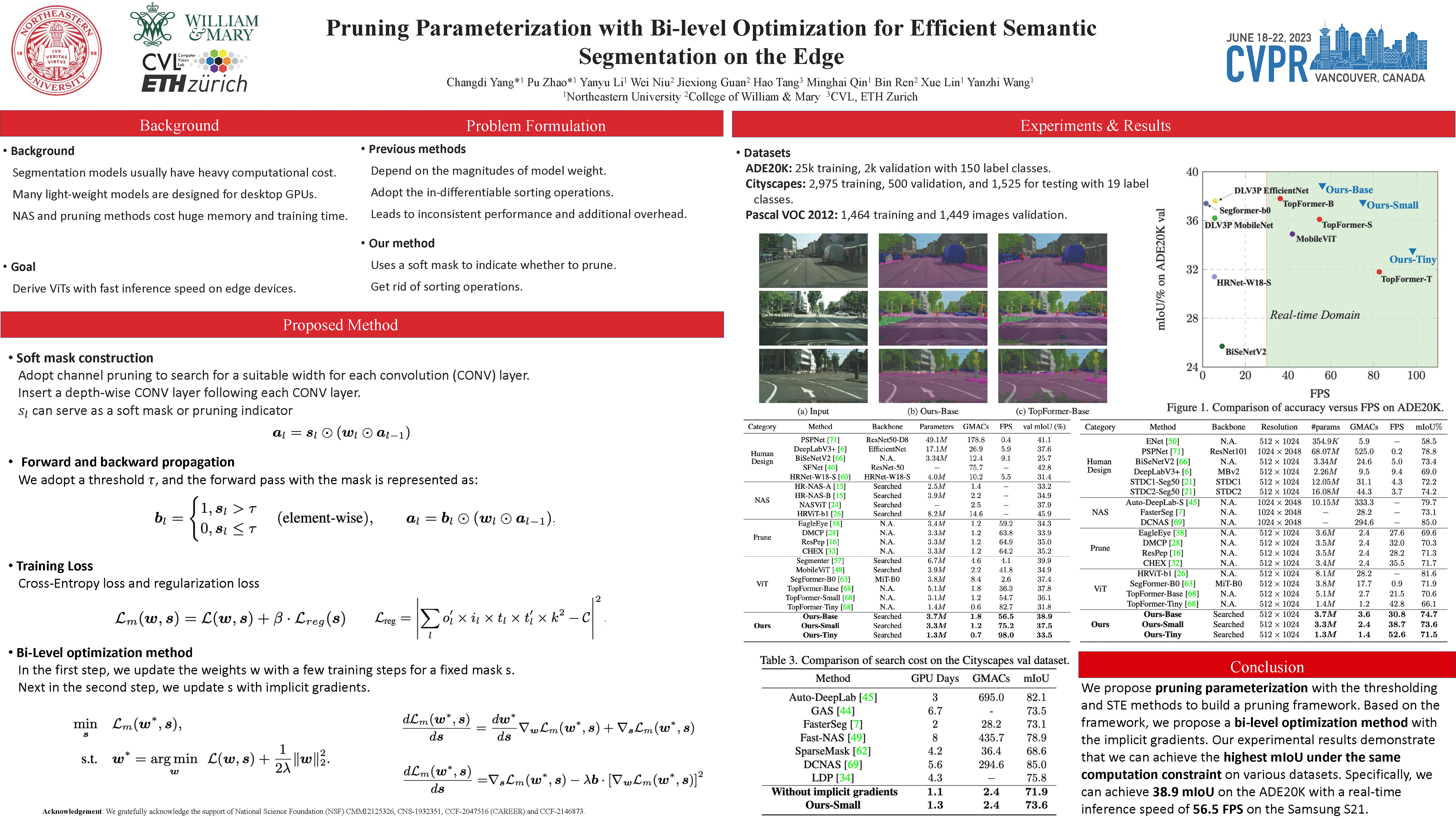
With the ever-increasing popularity of edge devices, it is necessary to implement real-time segmentation on the edge for autonomous driving and many other applications. Vision Transformers (ViTs) have shown considerably stronger results for many vision tasks. However, ViTs with the full-attention mechanism usually consume a large number of computational resources, leading to difficulties for real-time inference on edge devices. In this paper, we aim to derive ViTs with fewer computations and fast inference speed to facilitate the dense prediction of semantic segmentation on edge devices. To achieve this, we propose a pruning parameterization method to formulate the pruning problem of semantic segmentation. Then we adopt a bi-level optimization method to solve this problem with the help of implicit gradients. Our experimental results demonstrate that we can achieve 38.9 mIoU on ADE20K val with a speed of 56.5 FPS on Samsung S21, which is the highest mIoU under the same computation constraint with real-time inference.