PointConvFormer: Revenge of the Point-Based Convolution
{kind=link}
Abstract
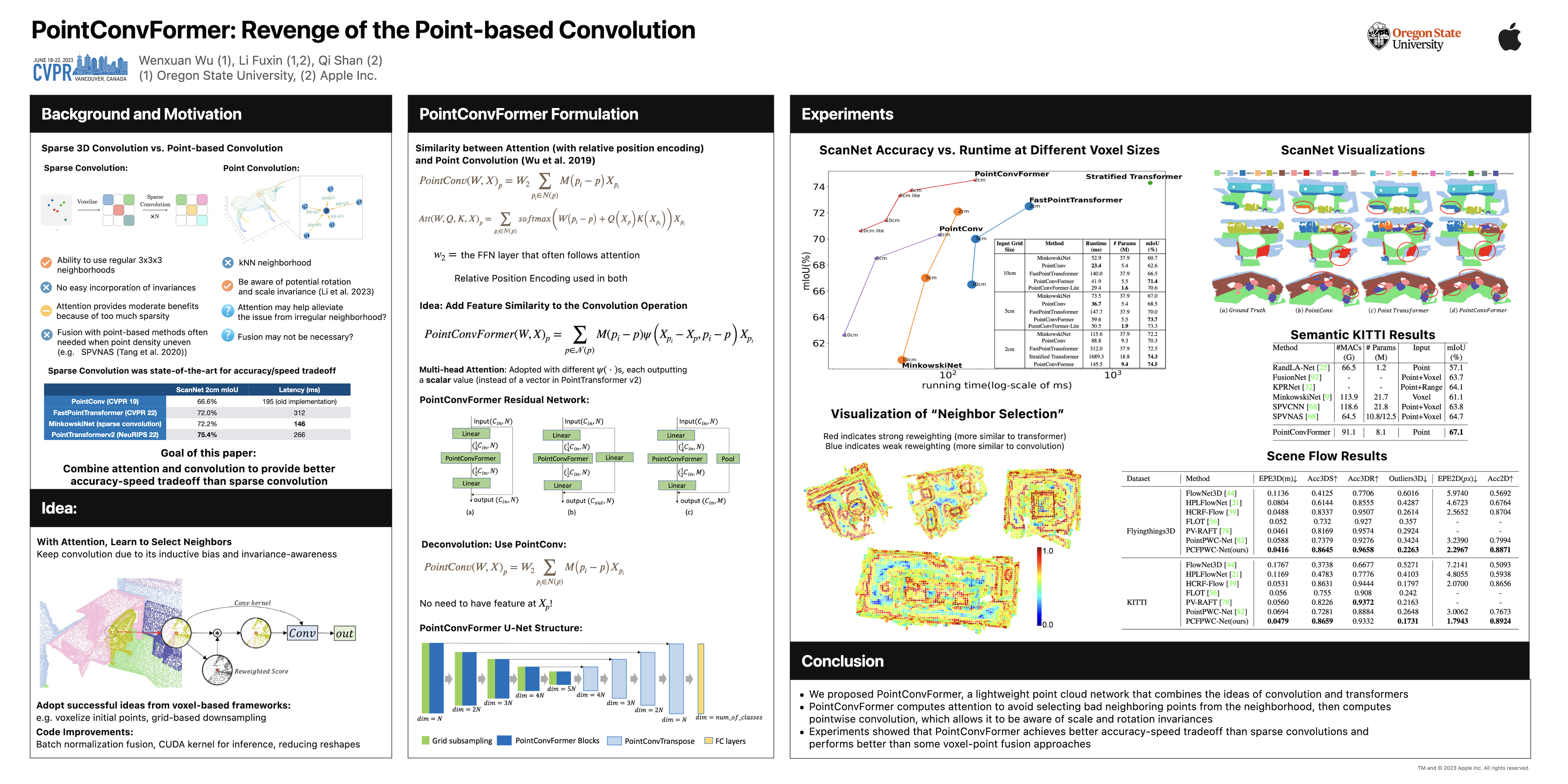
We introduce PointConvFormer, a novel building block for point cloud based deep network architectures. Inspired by generalization theory, PointConvFormer combines ideas from point convolution, where filter weights are only based on relative position, and Transformers which utilize feature-based attention. In PointConvFormer, attention computed from feature difference between points in the neighborhood is used to modify the convolutional weights at each point. Hence, we preserved the invariances from point convolution, whereas attention helps to select relevant points in the neighborhood for convolution. We experiment on both semantic segmentation and scene flow estimation tasks on point clouds with multiple datasets including ScanNet, SemanticKitti, FlyingThings3D and KITTI. Our results show that PointConvFormer substantially outperforms classic convolutions, regular transformers, and voxelized sparse convolution approaches with much smaller and faster networks. Visualizations show that PointConvFormer performs similarly to convolution on flat areas, whereas the neighborhood selection effect is stronger on object boundaries, showing that it has got the best of both worlds. The code will be available with the final version.