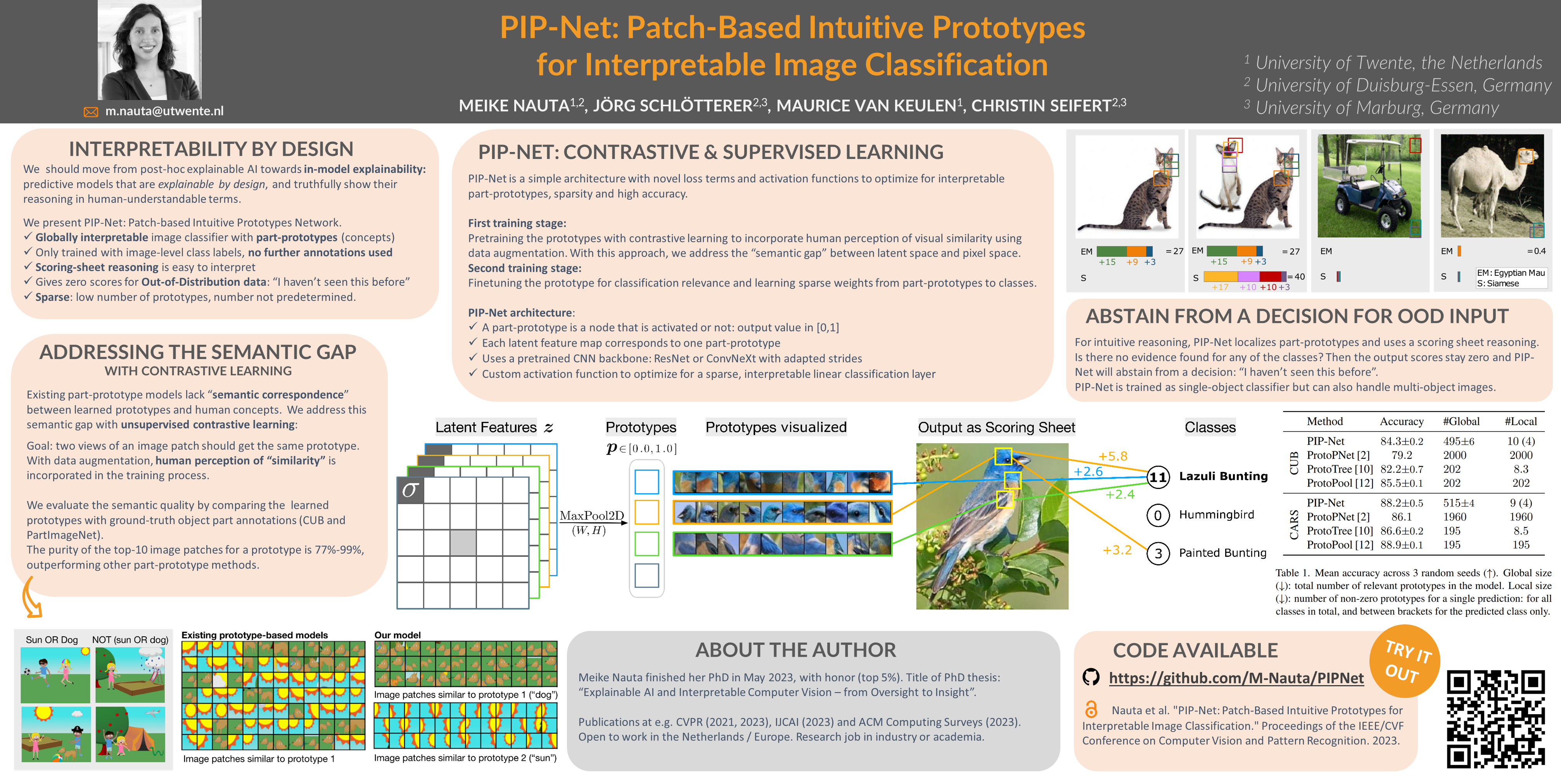
PIP-Net: Patch-Based Intuitive Prototypes for Interpretable Image Classification
{kind=link}
Abstract
Interpretable methods based on prototypical patches recognize various components in an image in order to explain their reasoning to humans. However, existing prototype-based methods can learn prototypes that are not in line with human visual perception, i.e., the same prototype can refer to different concepts in the real world, making interpretation not intuitive. Driven by the principle of explainability-by-design, we introduce PIP-Net (Patch-based Intuitive Prototypes Network): an interpretable image classification model that learns prototypical parts in a self-supervised fashion which correlate better with human vision. PIP-Net can be interpreted as a sparse scoring sheet where the presence of a prototypical part in an image adds evidence for a class. The model can also abstain from a decision for out-of-distribution data by saying “I haven’t seen this before”. We only use image-level labels and do not rely on any part annotations. PIP-Net is globally interpretable since the set of learned prototypes shows the entire reasoning of the model. A smaller local explanation locates the relevant prototypes in one image. We show that our prototypes correlate with ground-truth object parts, indicating that PIP-Net closes the “semantic gap” between latent space and pixel space. Hence, our PIP-Net with interpretable prototypes enables users to interpret the decision making process in an intuitive, faithful and semantically meaningful way. Code is available at https://github.com/M-Nauta/PIPNet.