Local-Guided Global: Paired Similarity Representation for Visual Reinforcement Learning
{kind=link}
Abstract
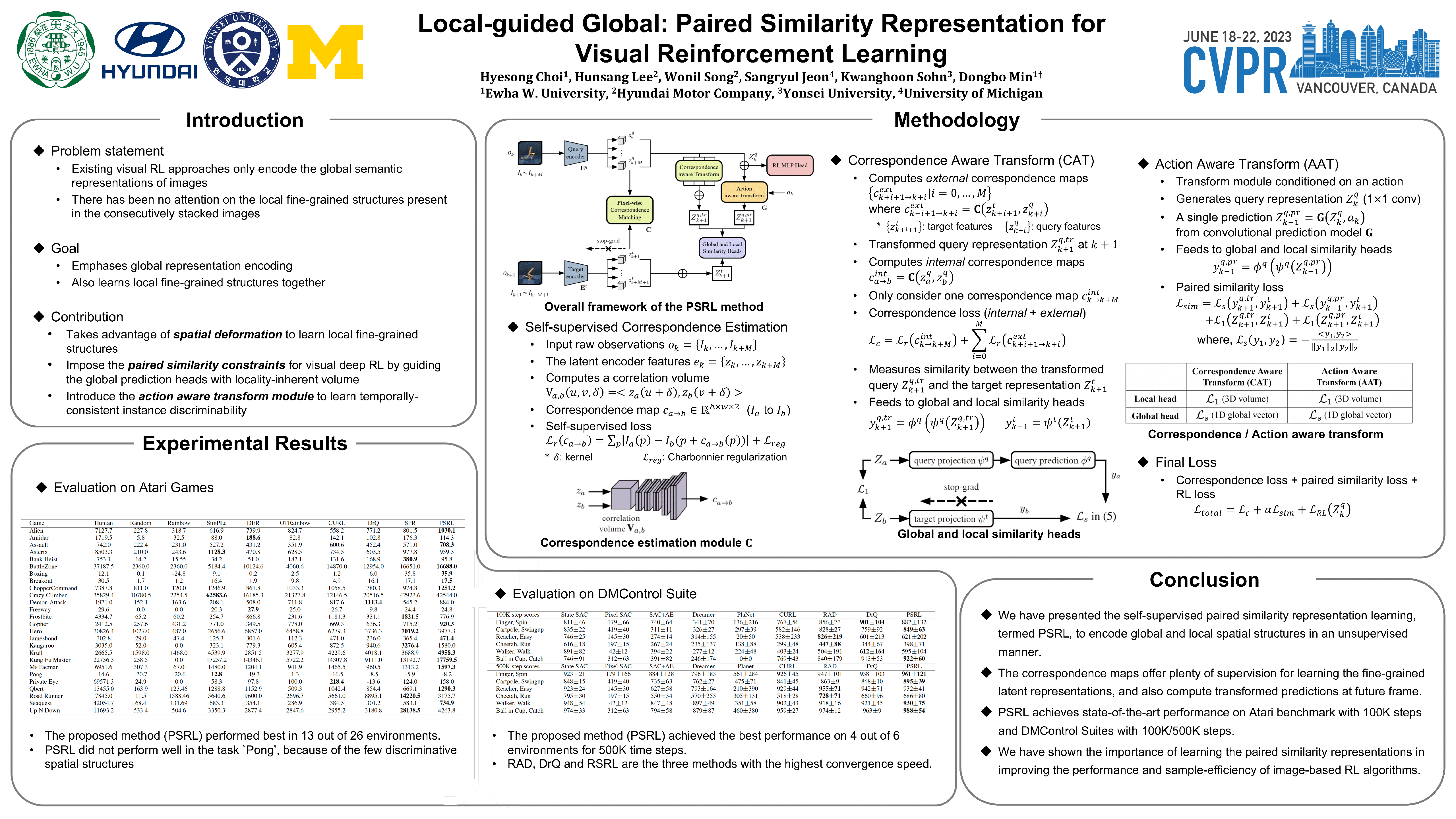
Recent vision-based reinforcement learning (RL) methods have found extracting high-level features from raw pixels with self-supervised learning to be effective in learning policies. However, these methods focus on learning global representations of images, and disregard local spatial structures present in the consecutively stacked frames. In this paper, we propose a novel approach, termed self-supervised Paired Similarity Representation Learning (PSRL) for effectively encoding spatial structures in an unsupervised manner. Given the input frames, the latent volumes are first generated individually using an encoder, and they are used to capture the variance in terms of local spatial structures, i.e., correspondence maps among multiple frames. This enables for providing plenty of fine-grained samples for training the encoder of deep RL. We further attempt to learn the global semantic representations in the global prediction module that predicts future state representations using action vector as a medium. The proposed method imposes similarity constraints on the three latent volumes; transformed query representations by estimated pixel-wise correspondence, predicted query representations from the global prediction model, and target representations of future state, guiding global prediction with locality-inherent volume. Experimental results on complex tasks in Atari Games and DeepMind Control Suite demonstrate that the RL methods are significantly boosted by the proposed self-supervised learning of structured representations.