E2PN: Efficient SE(3)-Equivariant Point Network
{kind=link}
Abstract
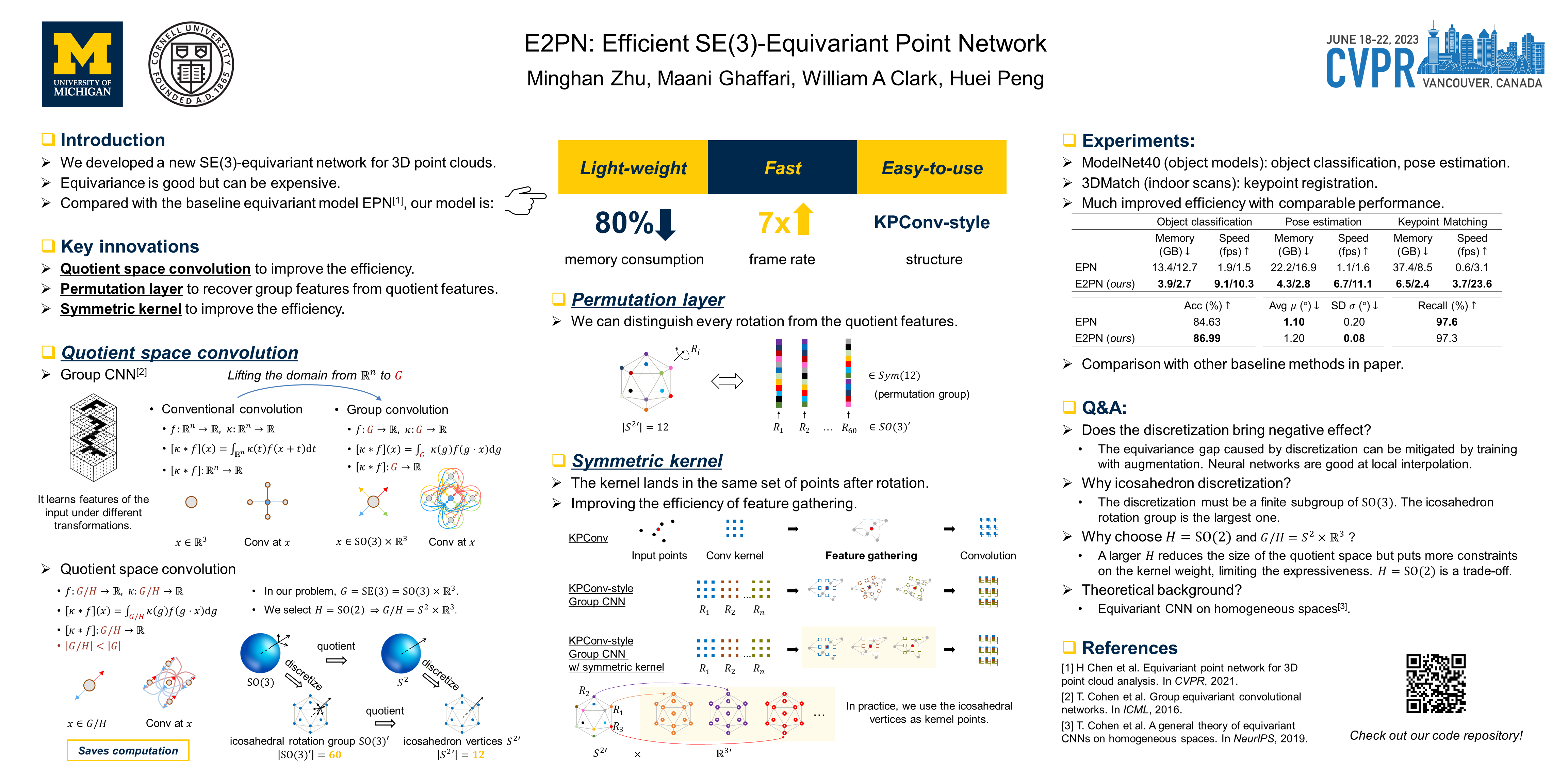
This paper proposes a convolution structure for learning SE(3)-equivariant features from 3D point clouds. It can be viewed as an equivariant version of kernel point convolutions (KPConv), a widely used convolution form to process point cloud data. Compared with existing equivariant networks, our design is simple, lightweight, fast, and easy to be integrated with existing task-specific point cloud learning pipelines. We achieve these desirable properties by combining group convolutions and quotient representations. Specifically, we discretize SO(3) to finite groups for their simplicity while using SO(2) as the stabilizer subgroup to form spherical quotient feature fields to save computations. We also propose a permutation layer to recover SO(3) features from spherical features to preserve the capacity to distinguish rotations. Experiments show that our method achieves comparable or superior performance in various tasks, including object classification, pose estimation, and keypoint-matching, while consuming much less memory and running faster than existing work. The proposed method can foster the development of equivariant models for real-world applications based on point clouds.