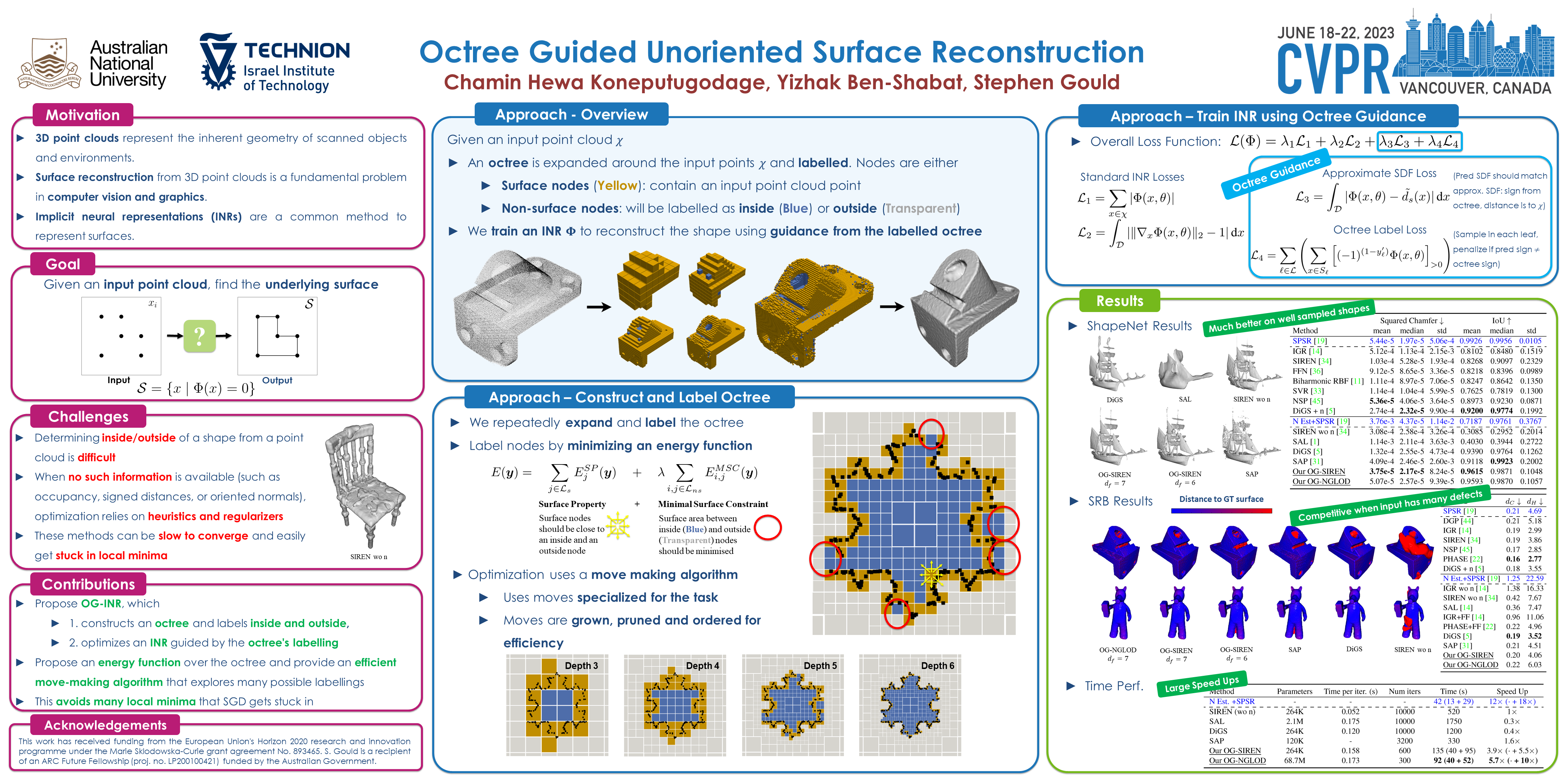
Octree Guided Unoriented Surface Reconstruction
{kind=link}
Abstract
We address the problem of surface reconstruction from unoriented point clouds. Implicit neural representations (INRs) have become popular for this task, but when information relating to the inside versus outside of a shape is not available (such as shape occupancy, signed distances or surface normal orientation) optimization relies on heuristics and regularizers to recover the surface. These methods can be slow to converge and easily get stuck in local minima. We propose a two-step approach, OG-INR, where we (1) construct a discrete octree and label what is inside and outside (2) optimize for a continuous and high-fidelity shape using an INR that is initially guided by the octree’s labelling. To solve for our labelling, we propose an energy function over the discrete structure and provide an efficient move-making algorithm that explores many possible labellings. Furthermore we show that we can easily inject knowledge into the discrete octree, providing a simple way to influence the result from the continuous INR. We evaluate the effectiveness of our approach on two unoriented surface reconstruction datasets and show competitive performance compared to other unoriented, and some oriented, methods. Our results show that the exploration by the move-making algorithm avoids many of the bad local minima reached by purely gradient descent optimized methods (see Figure 1).