Semi-Supervised Stereo-Based 3D Object Detection via Cross-View Consensus
{kind=link}
Abstract
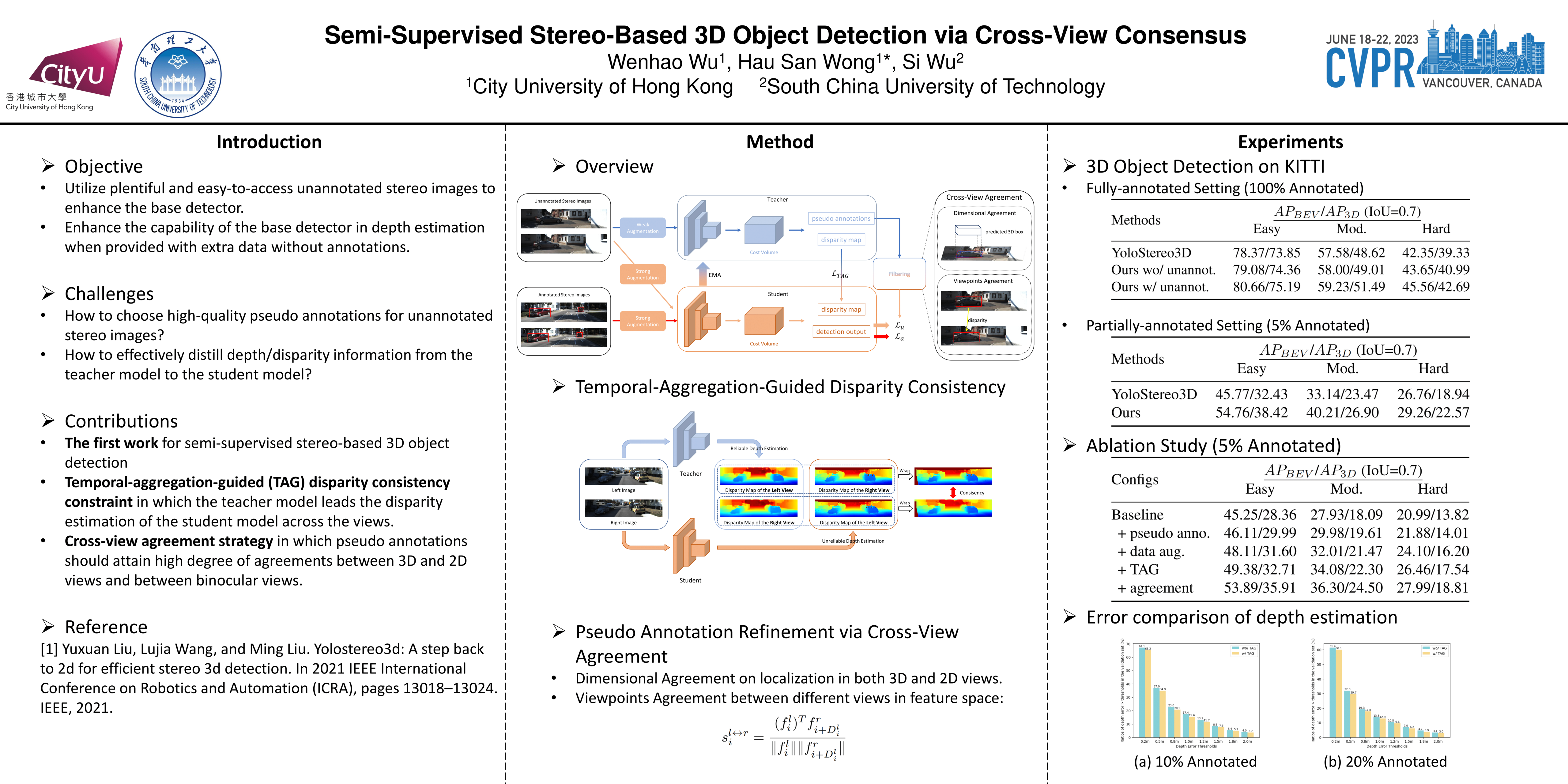
Stereo-based 3D object detection, which aims at detecting 3D objects with stereo cameras, shows great potential in low-cost deployment compared to LiDAR-based methods and excellent performance compared to monocular-based algorithms. However, the impressive performance of stereo-based 3D object detection is at the huge cost of high-quality manual annotations, which are hardly attainable for any given scene. Semi-supervised learning, in which limited annotated data and numerous unannotated data are required to achieve a satisfactory model, is a promising method to address the problem of data deficiency. In this work, we propose to achieve semi-supervised learning for stereo-based 3D object detection through pseudo annotation generation from a temporal-aggregated teacher model, which temporally accumulates knowledge from a student model. To facilitate a more stable and accurate depth estimation, we introduce Temporal-Aggregation-Guided (TAG) disparity consistency, a cross-view disparity consistency constraint between the teacher model and the student model for robust and improved depth estimation. To mitigate noise in pseudo annotation generation, we propose a cross-view agreement strategy, in which pseudo annotations should attain high degree of agreements between 3D and 2D views, as well as between binocular views. We perform extensive experiments on the KITTI 3D dataset to demonstrate our proposed method’s capability in leveraging a huge amount of unannotated stereo images to attain significantly improved detection results.