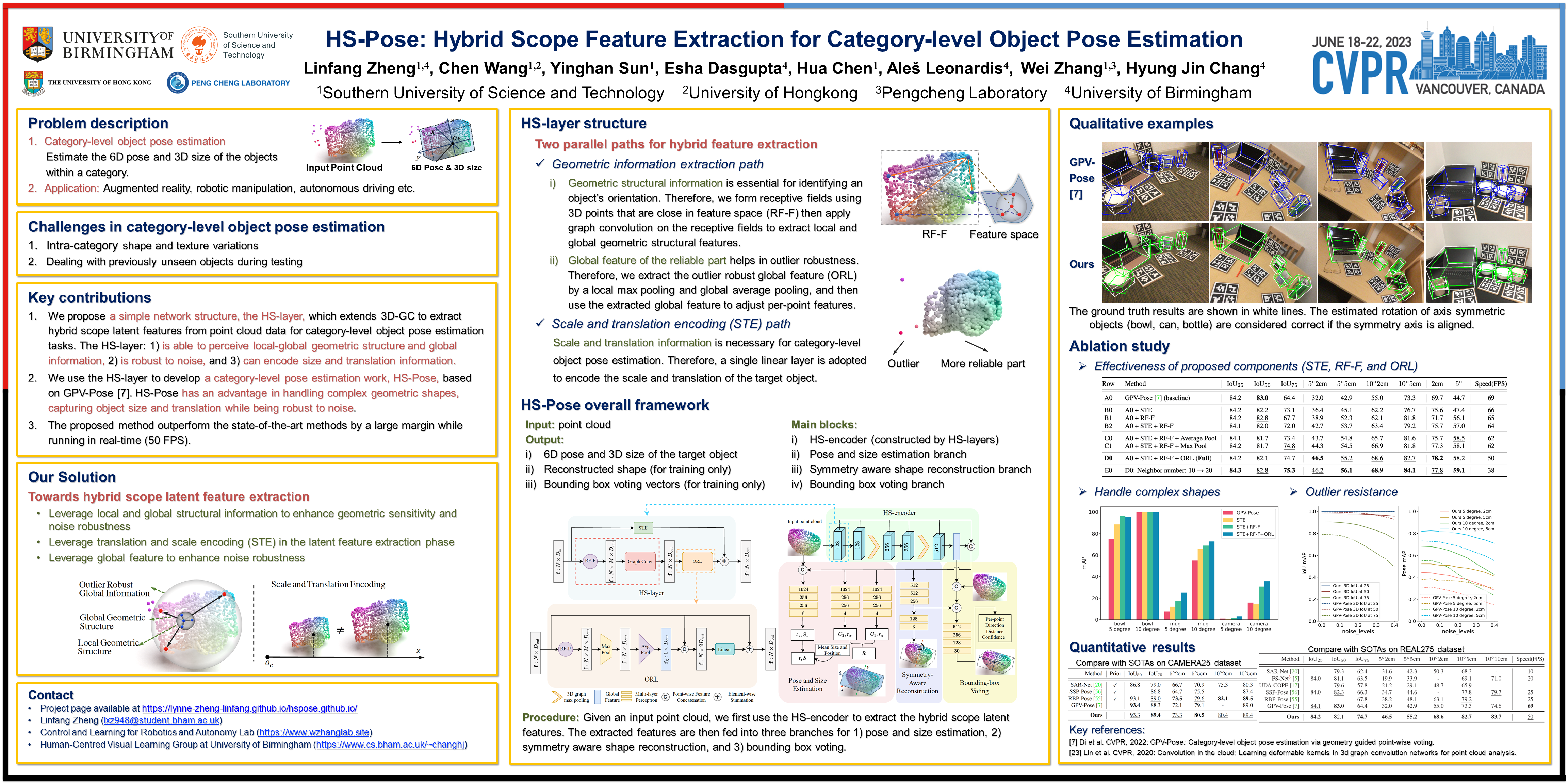
HS-Pose: Hybrid Scope Feature Extraction for Category-Level Object Pose Estimation
{kind=link}
Abstract
In this paper, we focus on the problem of category-level object pose estimation, which is challenging due to the large intra-category shape variation. 3D graph convolution (3D-GC) based methods have been widely used to extract local geometric features, but they have limitations for complex shaped objects and are sensitive to noise. Moreover, the scale and translation invariant properties of 3D-GC restrict the perception of an object’s size and translation information. In this paper, we propose a simple network structure, the HS-layer, which extends 3D-GC to extract hybrid scope latent features from point cloud data for category-level object pose estimation tasks. The proposed HS-layer: 1) is able to perceive local-global geometric structure and global information, 2) is robust to noise, and 3) can encode size and translation information. Our experiments show that the simple replacement of the 3D-GC layer with the proposed HS-layer on the baseline method (GPV-Pose) achieves a significant improvement, with the performance increased by 14.5% on 5d2cm metric and 10.3% on IoU75. Our method outperforms the state-of-the-art methods by a large margin (8.3% on 5d2cm, 6.9% on IoU75) on REAL275 dataset and runs in real-time (50 FPS).