SGLoc: Scene Geometry Encoding for Outdoor LiDAR Localization
{kind=link}
Abstract
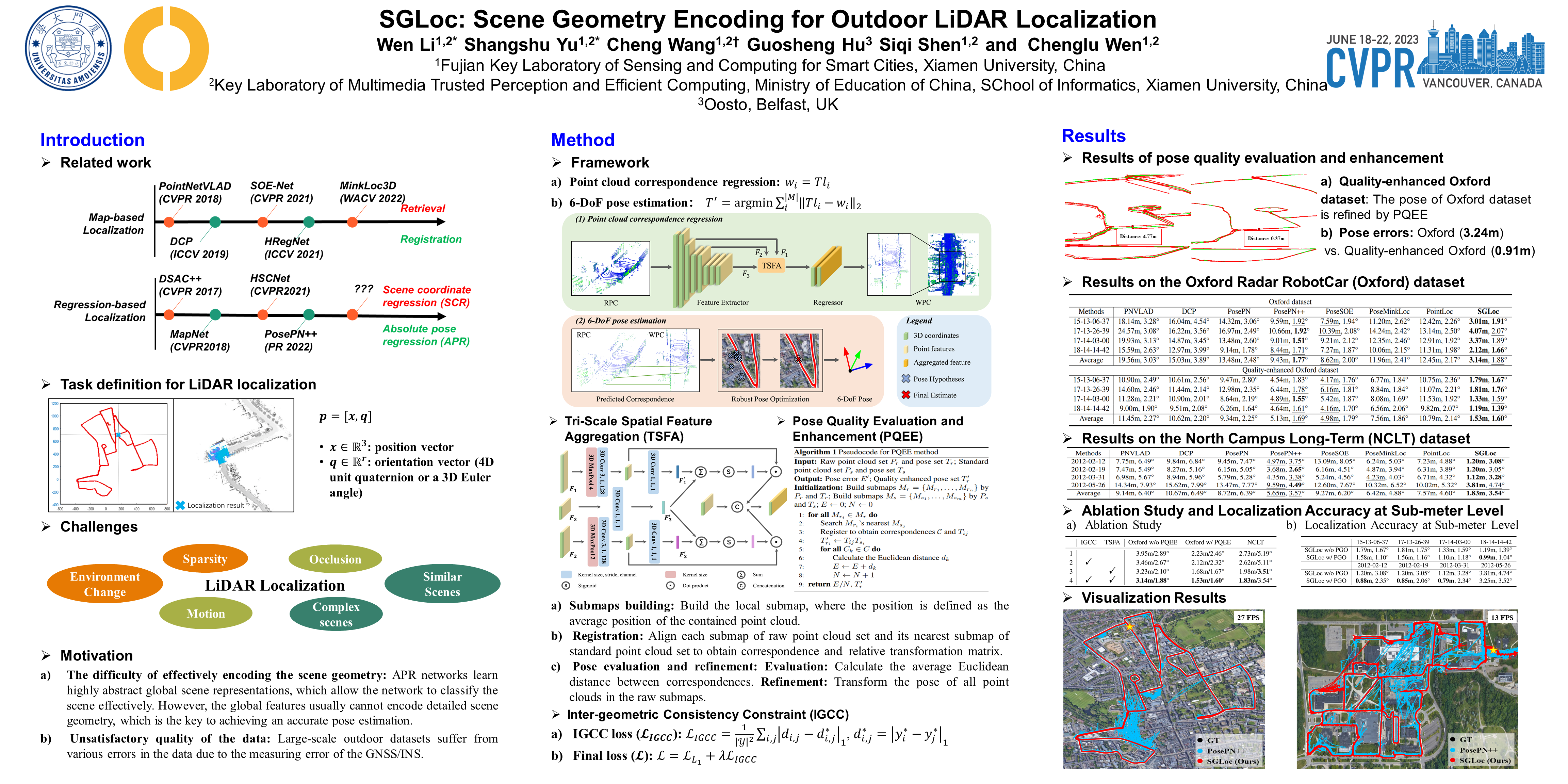
LiDAR-based absolute pose regression estimates the global pose through a deep network in an end-to-end manner, achieving impressive results in learning-based localization. However, the accuracy of existing methods still has room to improve due to the difficulty of effectively encoding the scene geometry and the unsatisfactory quality of the data. In this work, we propose a novel LiDAR localization framework, SGLoc, which decouples the pose estimation to point cloud correspondence regression and pose estimation via this correspondence. This decoupling effectively encodes the scene geometry because the decoupled correspondence regression step greatly preserves the scene geometry, leading to significant performance improvement. Apart from this decoupling, we also design a tri-scale spatial feature aggregation module and inter-geometric consistency constraint loss to effectively capture scene geometry. Moreover, we empirically find that the ground truth might be noisy due to GPS/INS measuring errors, greatly reducing the pose estimation performance. Thus, we propose a pose quality evaluation and enhancement method to measure and correct the ground truth pose. Extensive experiments on the Oxford Radar RobotCar and NCLT datasets demonstrate the effectiveness of SGLoc, which outperforms state-of-the-art regression-based localization methods by 68.5% and 67.6% on position accuracy, respectively.