Resource-Efficient RGBD Aerial Tracking
{kind=link}
Abstract
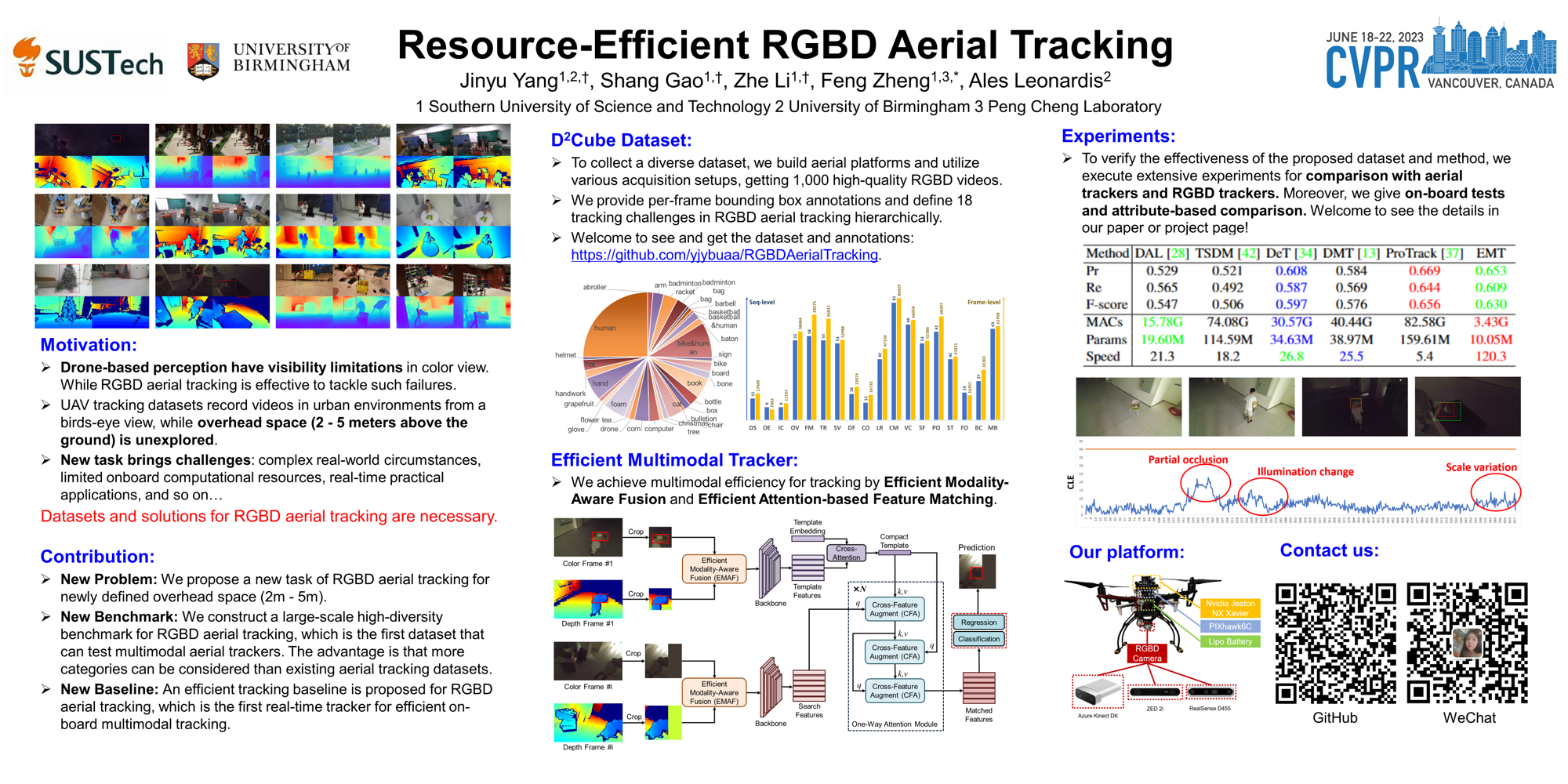
Aerial robots are now able to fly in complex environments, and drone-captured data gains lots of attention in object tracking. However, current research on aerial perception has mainly focused on limited categories, such as pedestrian or vehicle, and most scenes are captured in urban environments from a birds-eye view. Recently, UAVs equipped with depth cameras have been also deployed for more complex applications, while RGBD aerial tracking is still unexplored. Compared with traditional RGB object tracking, adding depth information can more effectively deal with more challenging scenes such as target and background interference. To this end, in this paper, we explore RGBD aerial tracking in an overhead space, which can greatly enlarge the development of drone-based visual perception. To boost the research, we first propose a large-scale benchmark for RGBD aerial tracking, containing 1,000 drone-captured RGBD videos with dense annotations. Then, as drone-based applications require for real-time processing with limited computational resources, we also propose an efficient RGBD tracker named EMT. Our tracker runs at over 100 fps on GPU, and 25 fps on the edge platform of NVidia Jetson NX Xavier, benefiting from its efficient multimodal fusion and feature matching. Extensive experiments show that our EMT achieves promising tracking performance. All resources are available at https://github.com/yjybuaa/RGBDAerialTracking.