Optimal Proposal Learning for Deployable End-to-End Pedestrian Detection
{kind=link}
Abstract
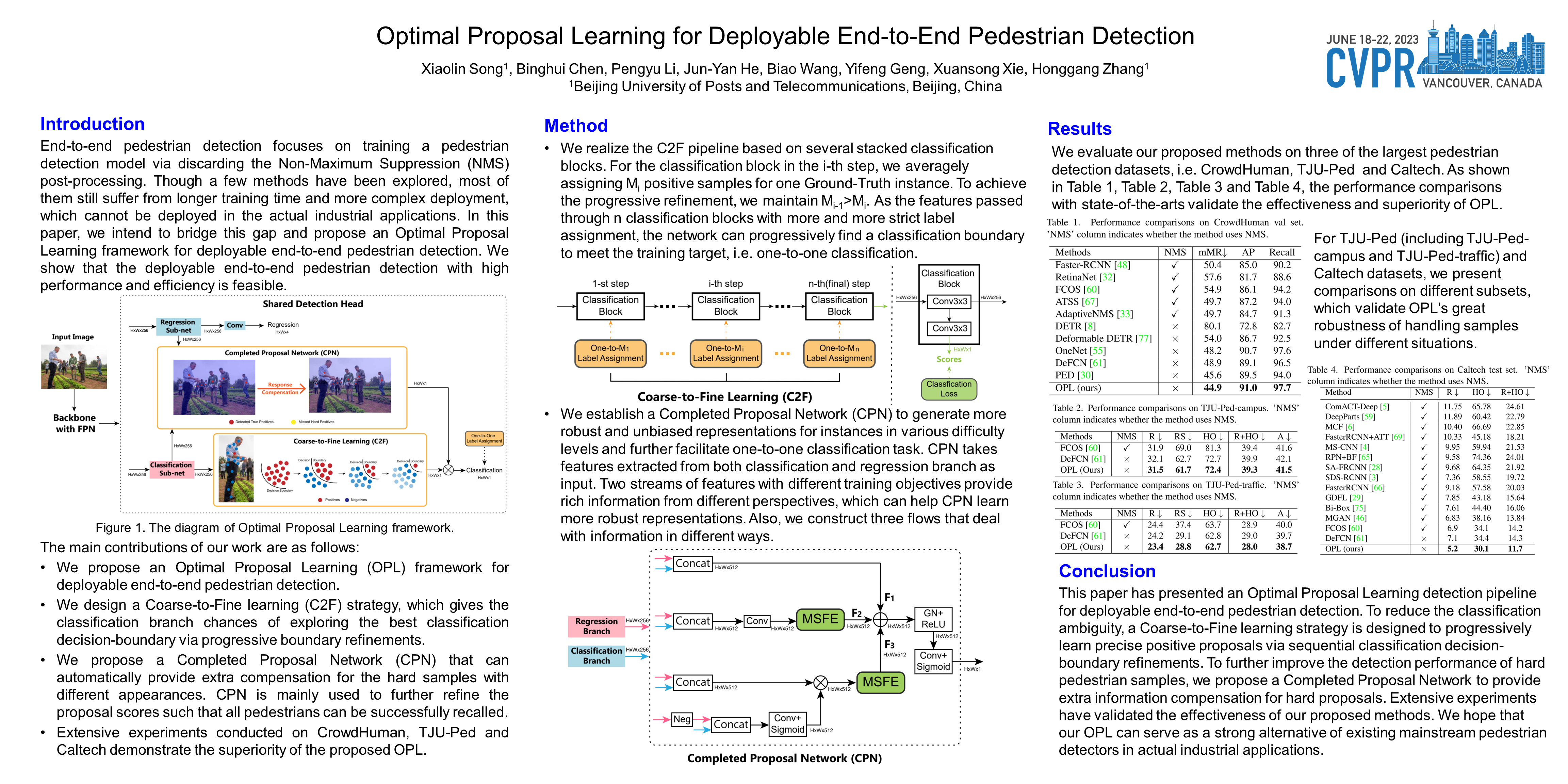
End-to-end pedestrian detection focuses on training a pedestrian detection model via discarding the Non-Maximum Suppression (NMS) post-processing. Though a few methods have been explored, most of them still suffer from longer training time and more complex deployment, which cannot be deployed in the actual industrial applications. In this paper, we intend to bridge this gap and propose an Optimal Proposal Learning (OPL) framework for deployable end-to-end pedestrian detection. Specifically, we achieve this goal by using CNN-based light detector and introducing two novel modules, including a Coarse-to-Fine (C2F) learning strategy for proposing precise positive proposals for the Ground-Truth (GT) instances by reducing the ambiguity of sample assignment/output in training/testing respectively, and a Completed Proposal Network (CPN) for producing extra information compensation to further recall the hard pedestrian samples. Extensive experiments are conducted on CrowdHuman, TJU-Ped and Caltech, and the results show that our proposed OPL method significantly outperforms the competing methods.