VisFusion: Visibility-Aware Online 3D Scene Reconstruction From Videos
{kind=link}
Abstract
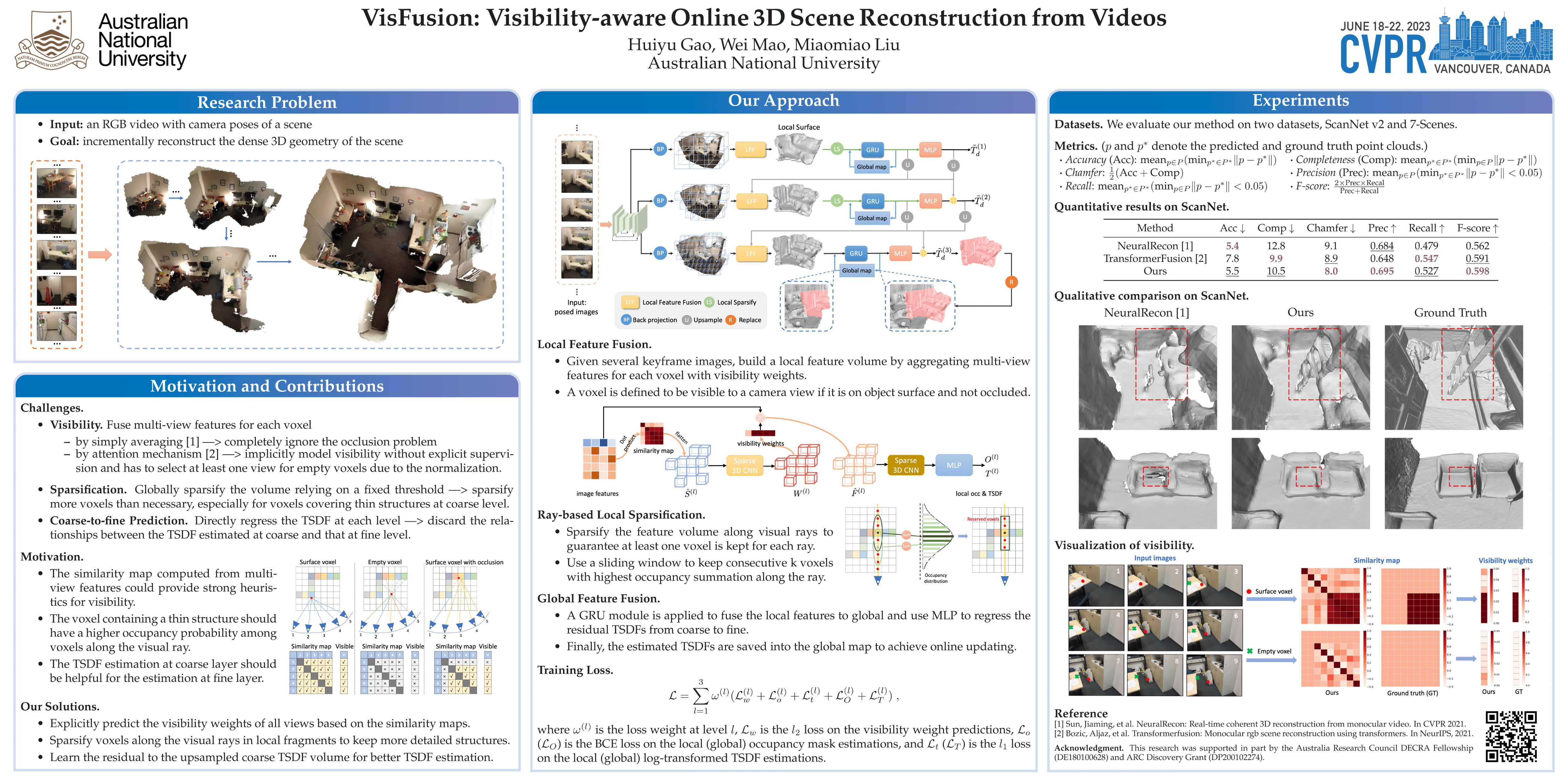
We propose VisFusion, a visibility-aware online 3D scene reconstruction approach from posed monocular videos. In particular, we aim to reconstruct the scene from volumetric features. Unlike previous reconstruction methods which aggregate features for each voxel from input views without considering its visibility, we aim to improve the feature fusion by explicitly inferring its visibility from a similarity matrix, computed from its projected features in each image pair. Following previous works, our model is a coarse-to-fine pipeline including a volume sparsification process. Different from their works which sparsify voxels globally with a fixed occupancy threshold, we perform the sparsification on a local feature volume along each visual ray to preserve at least one voxel per ray for more fine details. The sparse local volume is then fused with a global one for online reconstruction. We further propose to predict TSDF in a coarse-to-fine manner by learning its residuals across scales leading to better TSDF predictions. Experimental results on benchmarks show that our method can achieve superior performance with more scene details. Code is available at: https://github.com/huiyu-gao/VisFusion