Learning a Depth Covariance Function
Eric Dexheimer ⋅ Andrew J. Davison
2023 Poster
{kind=link}
Abstract
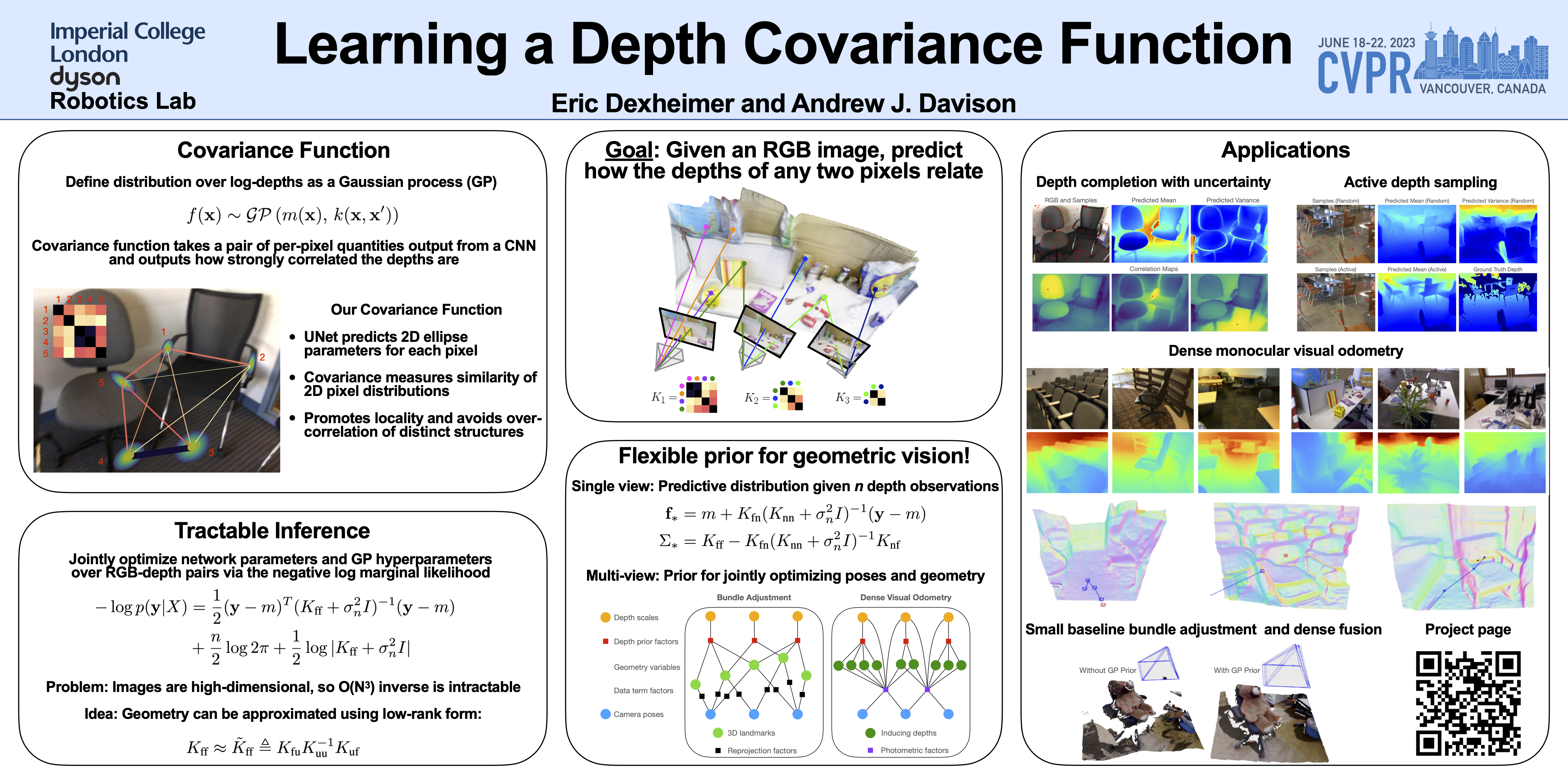
We propose learning a depth covariance function with applications to geometric vision tasks. Given RGB images as input, the covariance function can be flexibly used to define priors over depth functions, predictive distributions given observations, and methods for active point selection. We leverage these techniques for a selection of downstream tasks: depth completion, bundle adjustment, and monocular dense visual odometry.
Chat is not available.
Successful Page Load