LiDAR-in-the-Loop Hyperparameter Optimization
{kind=link}
Abstract
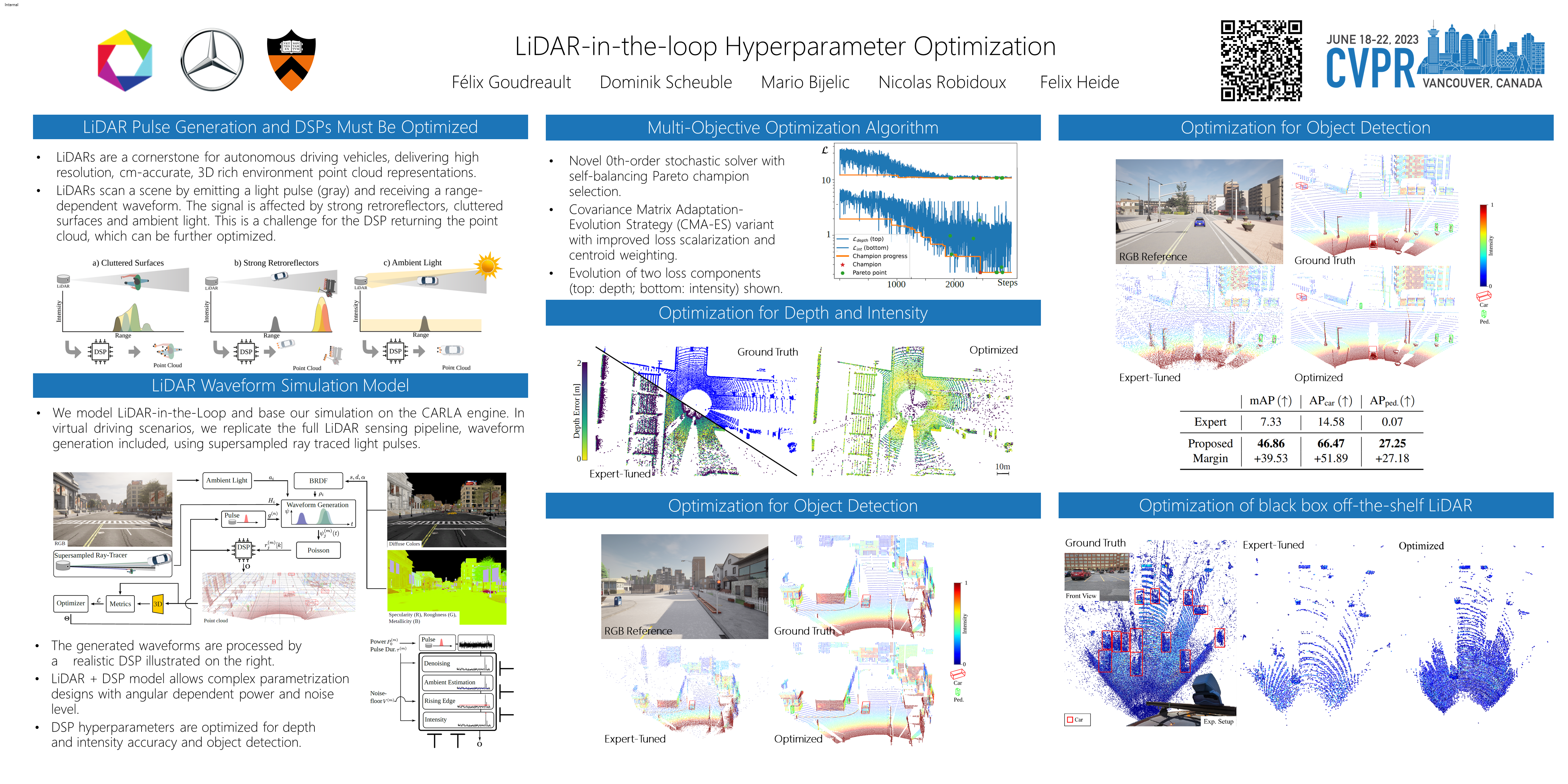
LiDAR has become a cornerstone sensing modality for 3D vision. LiDAR systems emit pulses of light into the scene, take measurements of the returned signal, and rely on hardware digital signal processing (DSP) pipelines to construct 3D point clouds from these measurements. The resulting point clouds output by these DSPs are input to downstream 3D vision models -- both, in the form of training datasets or as input at inference time. Existing LiDAR DSPs are composed of cascades of parameterized operations; modifying configuration parameters results in significant changes in the point clouds and consequently the output of downstream methods. Existing methods treat LiDAR systems as fixed black boxes and construct downstream task networks more robust with respect to measurement fluctuations. Departing from this approach, the proposed method directly optimizes LiDAR sensing and DSP parameters for downstream tasks. To investigate the optimization of LiDAR system parameters, we devise a realistic LiDAR simulation method that generates raw waveforms as input to a LiDAR DSP pipeline. We optimize LiDAR parameters for both 3D object detection IoU losses and depth error metrics by solving a nonlinear multi-objective optimization problem with a 0th-order stochastic algorithm. For automotive 3D object detection models, the proposed method outperforms manual expert tuning by 39.5% mean Average Precision (mAP).