Robust Multiview Point Cloud Registration With Reliable Pose Graph Initialization and History Reweighting
{kind=link}
Abstract
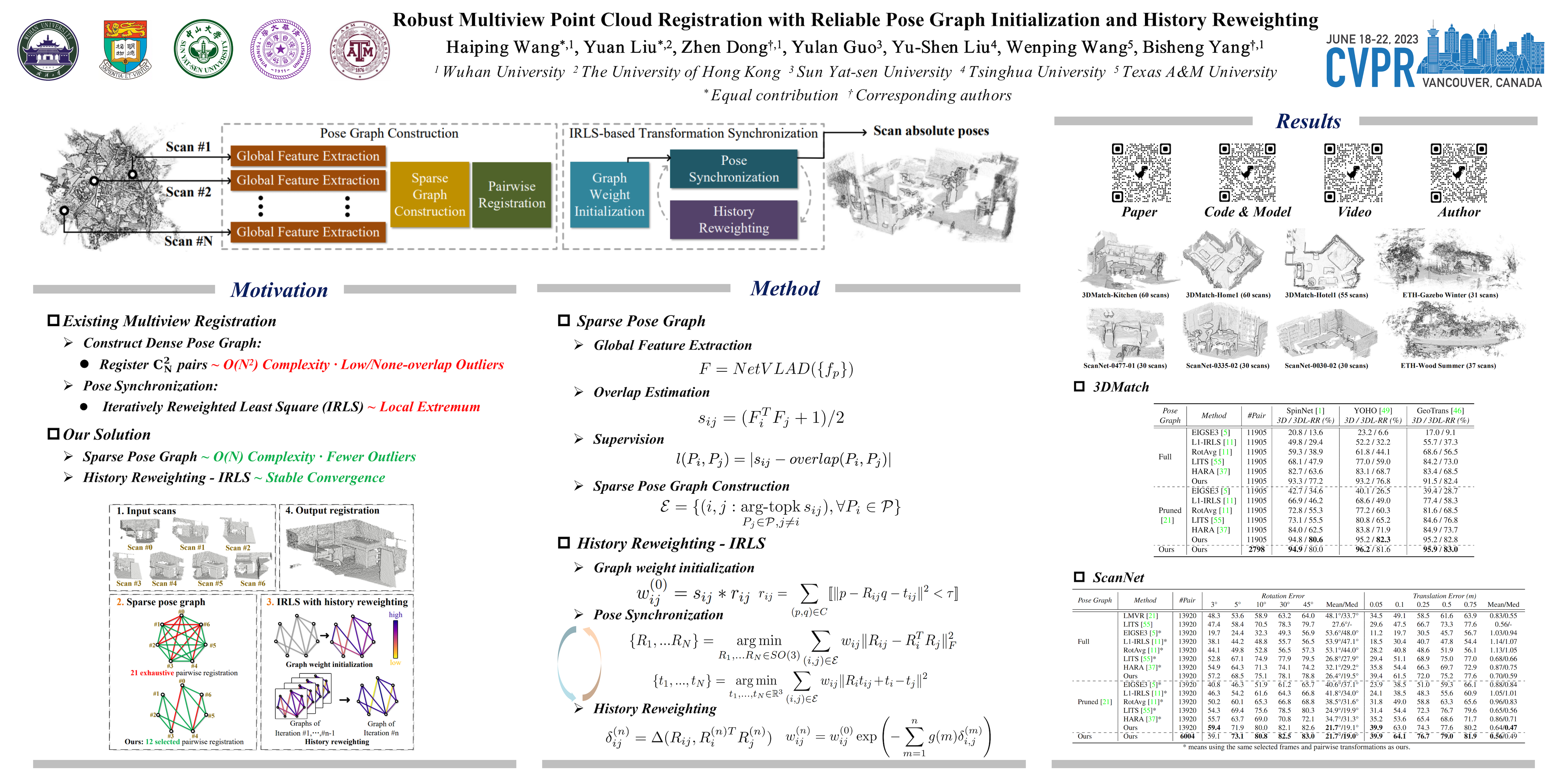
In this paper, we present a new method for the multiview registration of point cloud. Previous multiview registration methods rely on exhaustive pairwise registration to construct a densely-connected pose graph and apply Iteratively Reweighted Least Square (IRLS) on the pose graph to compute the scan poses. However, constructing a densely-connected graph is time-consuming and contains lots of outlier edges, which makes the subsequent IRLS struggle to find correct poses. To address the above problems, we first propose to use a neural network to estimate the overlap between scan pairs, which enables us to construct a sparse but reliable pose graph. Then, we design a novel history reweighting function in the IRLS scheme, which has strong robustness to outlier edges on the graph. In comparison with existing multiview registration methods, our method achieves 11% higher registration recall on the 3DMatch dataset and ~13% lower registration errors on the ScanNet dataset while reducing ~70% required pairwise registrations. Comprehensive ablation studies are conducted to demonstrate the effectiveness of our designs. The source code is available at https://github.com/WHU-USI3DV/SGHR.