Finding Geometric Models by Clustering in the Consensus Space
{kind=link}
Abstract
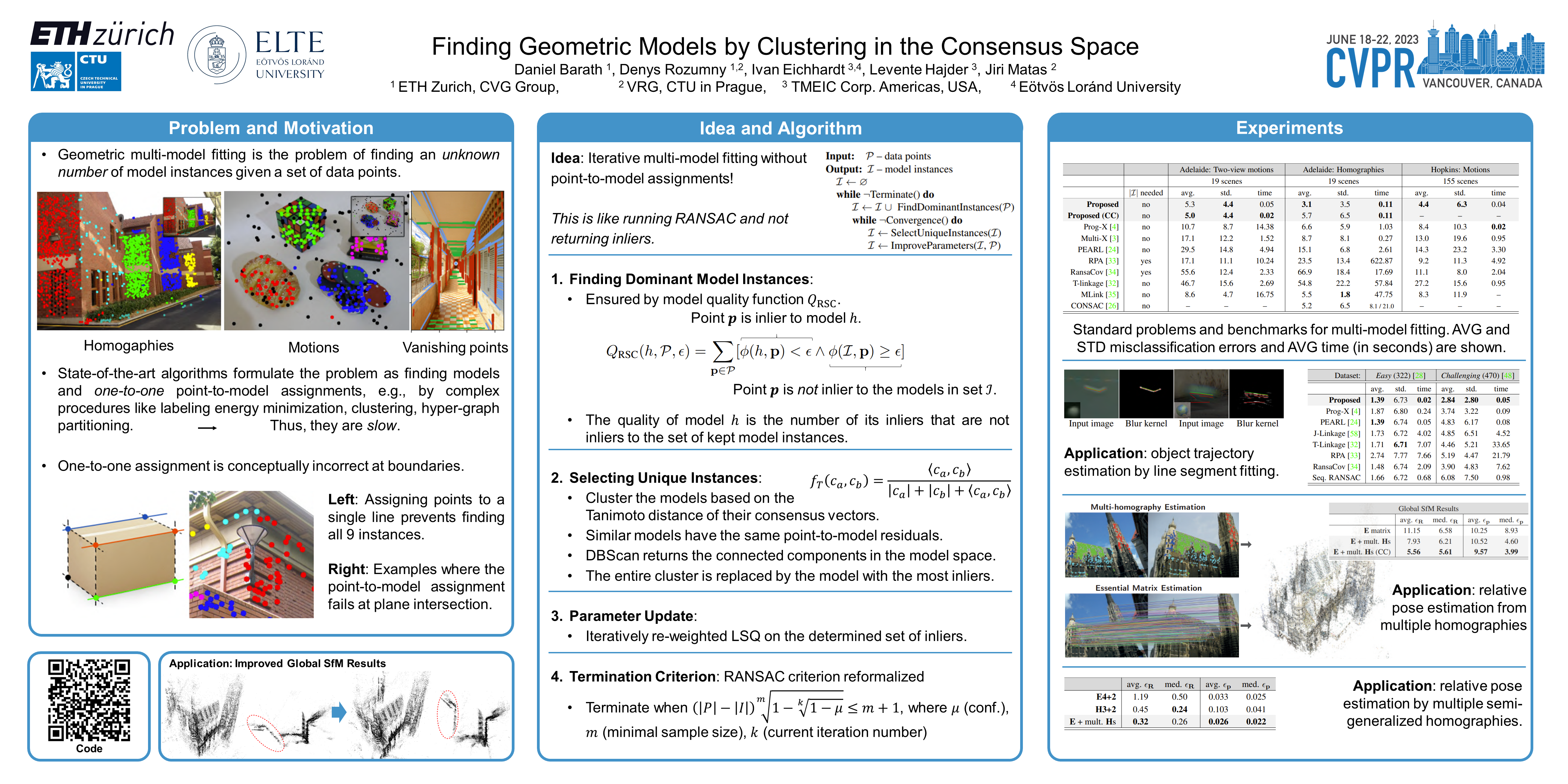
We propose a new algorithm for finding an unknown number of geometric models, e.g., homographies. The problem is formalized as finding dominant model instances progressively without forming crisp point-to-model assignments. Dominant instances are found via a RANSAC-like sampling and a consolidation process driven by a model quality function considering previously proposed instances. New ones are found by clustering in the consensus space. This new formulation leads to a simple iterative algorithm with state-of-the-art accuracy while running in real-time on a number of vision problems -- at least two orders of magnitude faster than the competitors on two-view motion estimation. Also, we propose a deterministic sampler reflecting the fact that real-world data tend to form spatially coherent structures. The sampler returns connected components in a progressively densified neighborhood-graph. We present a number of applications where the use of multiple geometric models improves accuracy. These include pose estimation from multiple generalized homographies; trajectory estimation of fast-moving objects; and we also propose a way of using multiple homographies in global SfM algorithms. Source code: https://github.com/danini/clustering-in-consensus-space.