Single Domain Generalization for LiDAR Semantic Segmentation
{kind=link}
Abstract
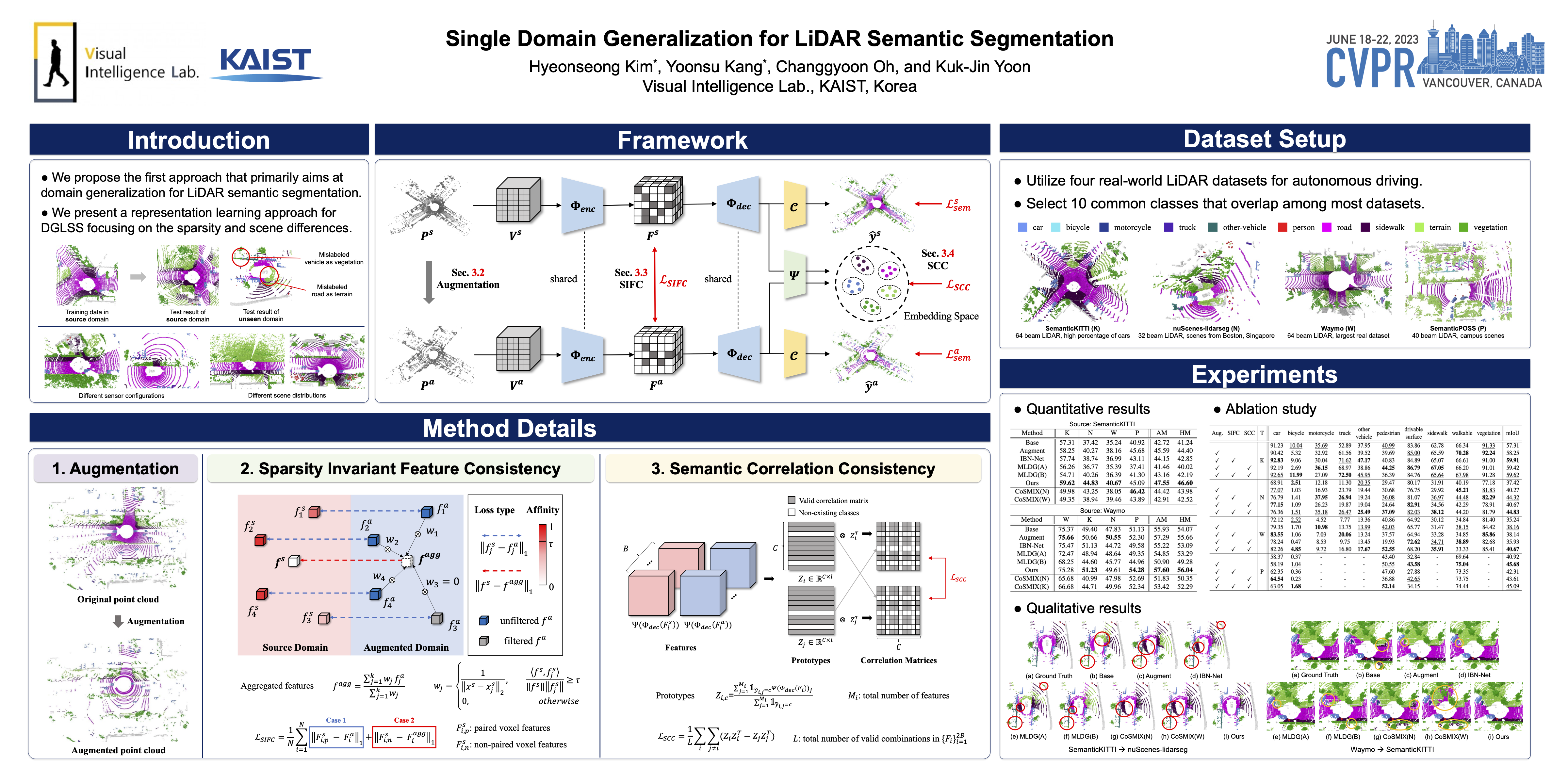
With the success of the 3D deep learning models, various perception technologies for autonomous driving have been developed in the LiDAR domain. While these models perform well in the trained source domain, they struggle in unseen domains with a domain gap. In this paper, we propose a single domain generalization method for LiDAR semantic segmentation (DGLSS) that aims to ensure good performance not only in the source domain but also in the unseen domain by learning only on the source domain. We mainly focus on generalizing from a dense source domain and target the domain shift from different LiDAR sensor configurations and scene distributions. To this end, we augment the domain to simulate the unseen domains by randomly subsampling the LiDAR scans. With the augmented domain, we introduce two constraints for generalizable representation learning: sparsity invariant feature consistency (SIFC) and semantic correlation consistency (SCC). The SIFC aligns sparse internal features of the source domain with the augmented domain based on the feature affinity. For SCC, we constrain the correlation between class prototypes to be similar for every LiDAR scan. We also establish a standardized training and evaluation setting for DGLSS. With the proposed evaluation setting, our method showed improved performance in the unseen domains compared to other baselines. Even without access to the target domain, our method performed better than the domain adaptation method. The code is available at https://github.com/gzgzys9887/DGLSS.