AssemblyHands: Towards Egocentric Activity Understanding via 3D Hand Pose Estimation
{kind=link}
Abstract
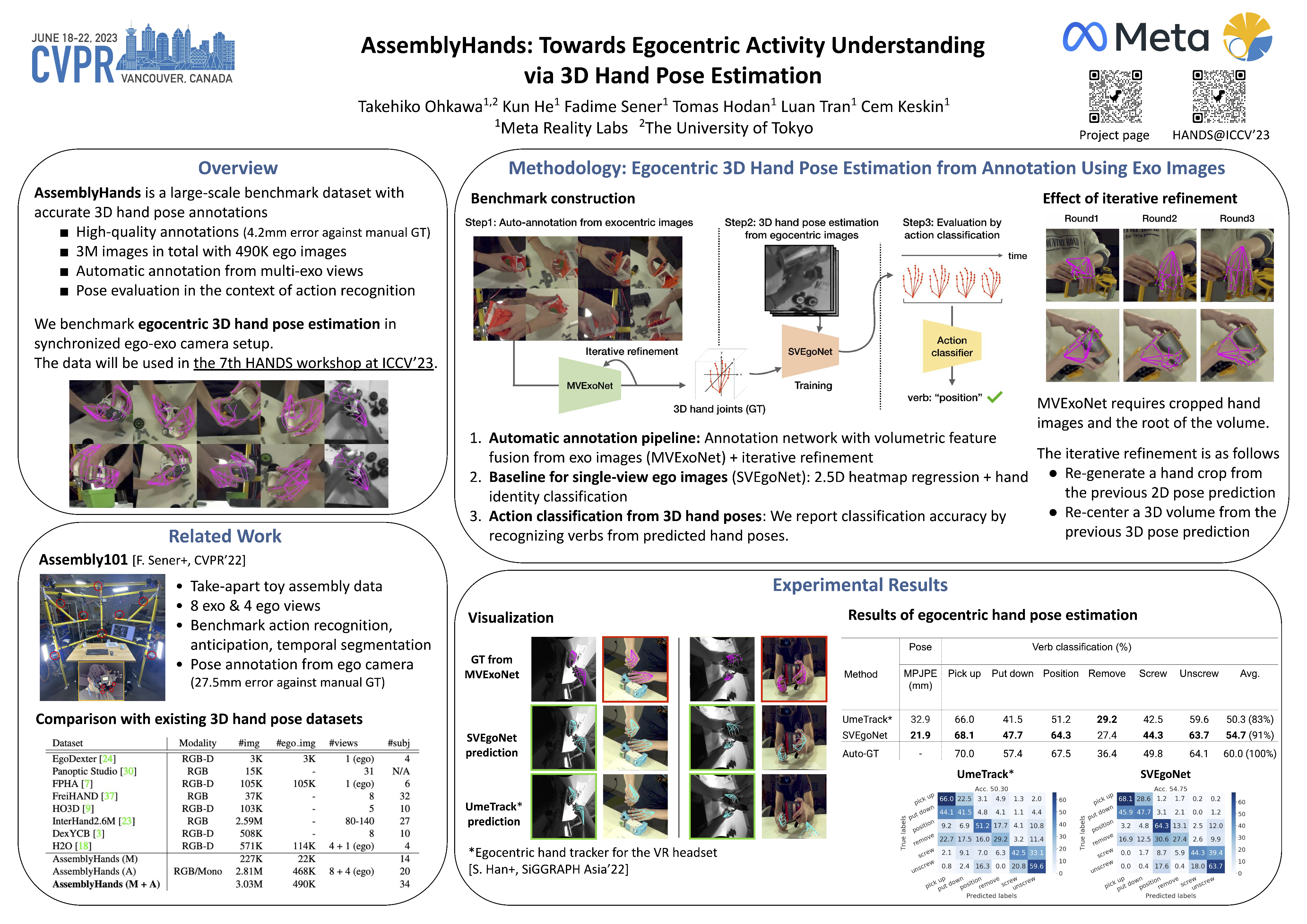
We present AssemblyHands, a large-scale benchmark dataset with accurate 3D hand pose annotations, to facilitate the study of egocentric activities with challenging hand-object interactions. The dataset includes synchronized egocentric and exocentric images sampled from the recent Assembly101 dataset, in which participants assemble and disassemble take-apart toys. To obtain high-quality 3D hand pose annotations for the egocentric images, we develop an efficient pipeline, where we use an initial set of manual annotations to train a model to automatically annotate a much larger dataset. Our annotation model uses multi-view feature fusion and an iterative refinement scheme, and achieves an average keypoint error of 4.20 mm, which is 85 % lower than the error of the original annotations in Assembly101. AssemblyHands provides 3.0M annotated images, including 490K egocentric images, making it the largest existing benchmark dataset for egocentric 3D hand pose estimation. Using this data, we develop a strong single-view baseline of 3D hand pose estimation from egocentric images. Furthermore, we design a novel action classification task to evaluate predicted 3D hand poses. Our study shows that having higher-quality hand poses directly improves the ability to recognize actions.