Tangentially Elongated Gaussian Belief Propagation for Event-Based Incremental Optical Flow Estimation
{kind=link}
Abstract
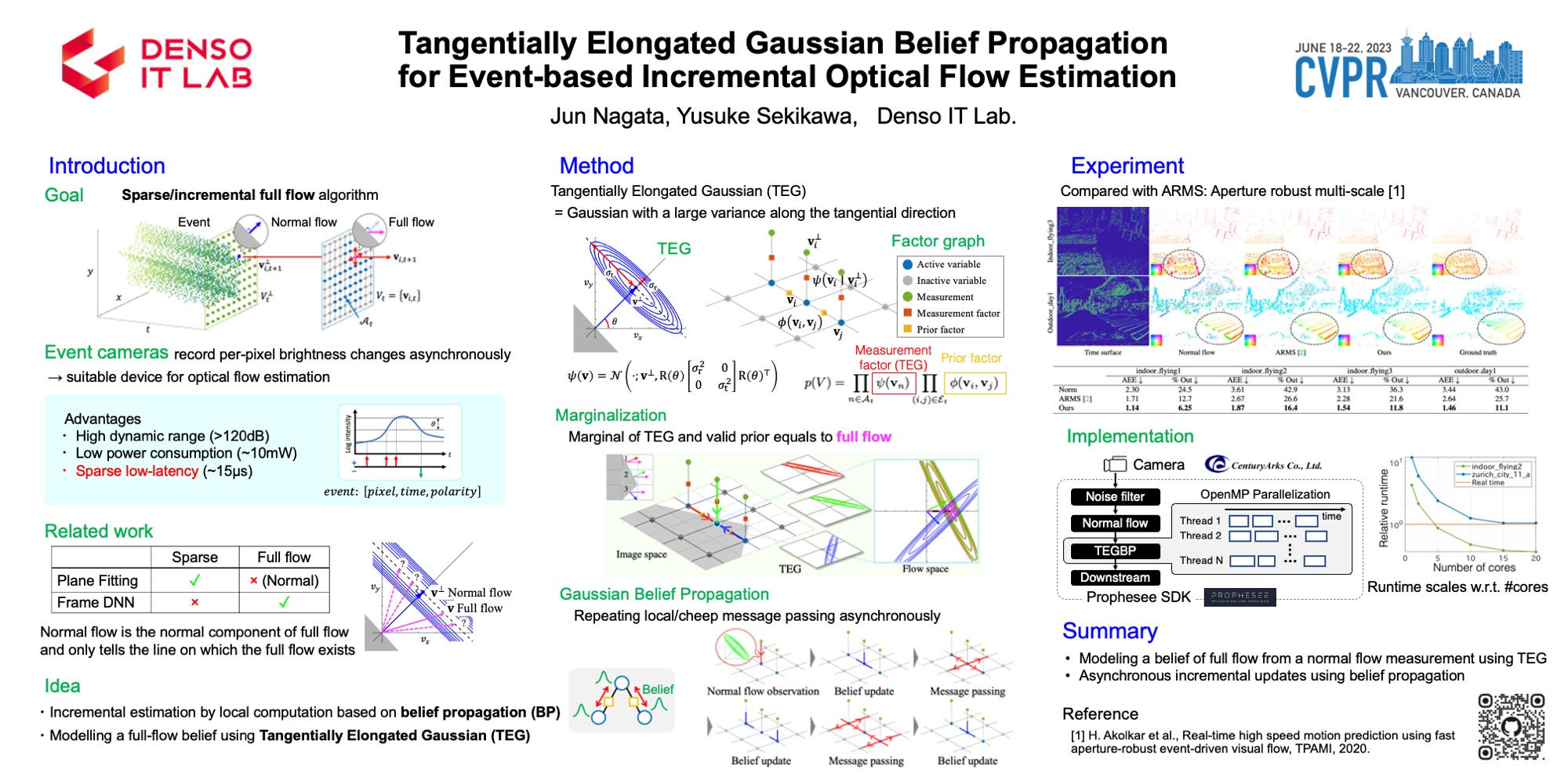
Optical flow estimation is a fundamental functionality in computer vision. An event-based camera, which asynchronously detects sparse intensity changes, is an ideal device for realizing low-latency estimation of the optical flow owing to its low-latency sensing mechanism. An existing method using local plane fitting of events could utilize the sparsity to realize incremental updates for low-latency estimation; however, its output is merely a normal component of the full optical flow. An alternative approach using a frame-based deep neural network could estimate the full flow; however, its intensive non-incremental dense operation prohibits the low-latency estimation. We propose tangentially elongated Gaussian (TEG) belief propagation (BP) that realizes incremental full-flow estimation. We model the probability of full flow as the joint distribution of TEGs from the normal flow measurements, such that the marginal of this distribution with correct prior equals the full flow. We formulate the marginalization using a message-passing based on the BP to realize efficient incremental updates using sparse measurements. In addition to the theoretical justification, we evaluate the effectiveness of the TEGBP in real-world datasets; it outperforms SOTA incremental quasi-full flow method by a large margin. The code will be open-sourced upon acceptance.