Understanding the Robustness of 3D Object Detection With Bird’s-Eye-View Representations in Autonomous Driving
{kind=link}
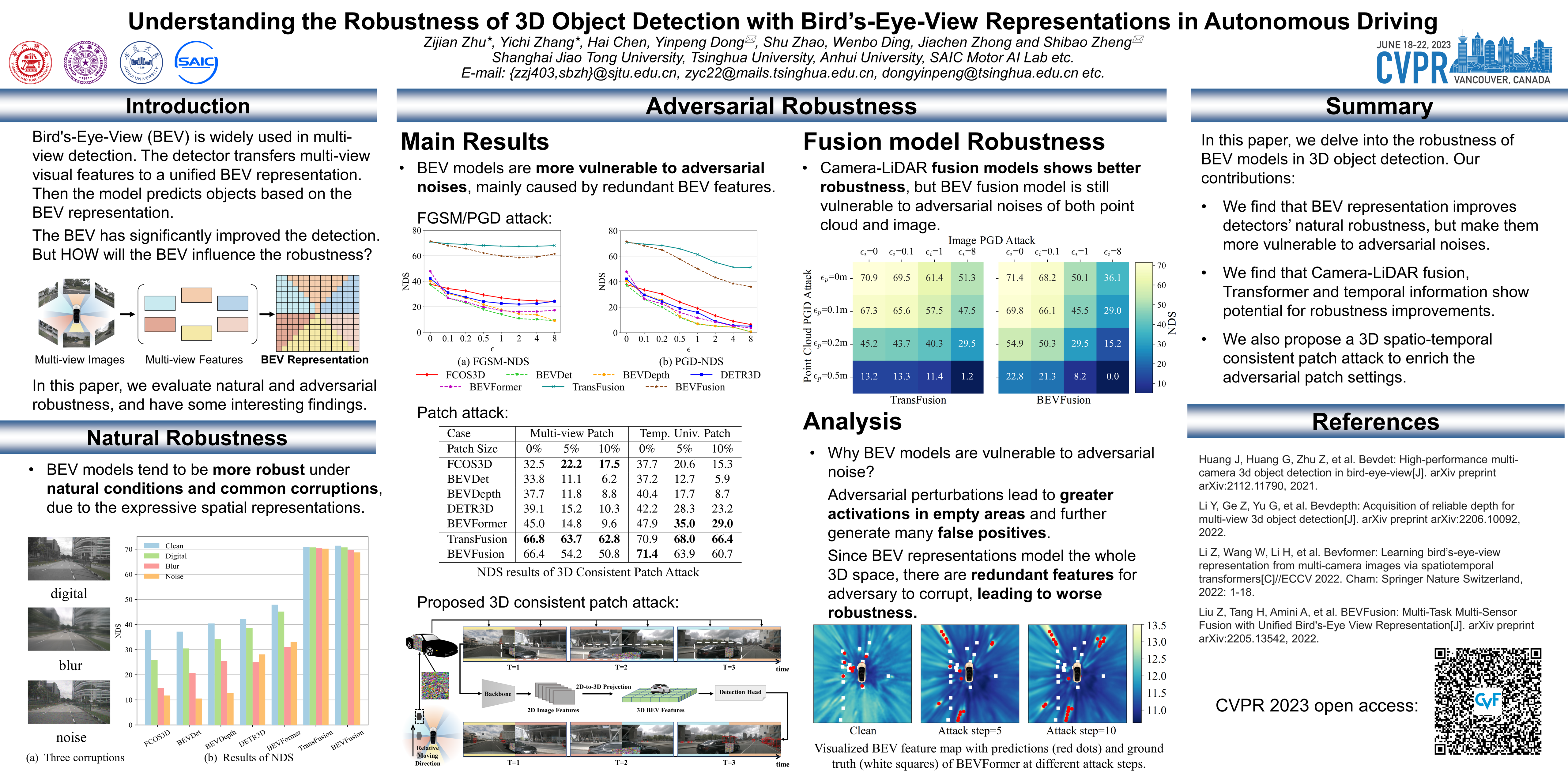
Abstract
3D object detection is an essential perception task in autonomous driving to understand the environments. The Bird’s-Eye-View (BEV) representations have significantly improved the performance of 3D detectors with camera inputs on popular benchmarks. However, there still lacks a systematic understanding of the robustness of these vision-dependent BEV models, which is closely related to the safety of autonomous driving systems. In this paper, we evaluate the natural and adversarial robustness of various representative models under extensive settings, to fully understand their behaviors influenced by explicit BEV features compared with those without BEV. In addition to the classic settings, we propose a 3D consistent patch attack by applying adversarial patches in the 3D space to guarantee the spatiotemporal consistency, which is more realistic for the scenario of autonomous driving. With substantial experiments, we draw several findings: 1) BEV models tend to be more stable than previous methods under different natural conditions and common corruptions due to the expressive spatial representations; 2) BEV models are more vulnerable to adversarial noises, mainly caused by the redundant BEV features; 3) Camera-LiDAR fusion models have superior performance under different settings with multi-modal inputs, but BEV fusion model is still vulnerable to adversarial noises of both point cloud and image. These findings alert the safety issue in the applications of BEV detectors and could facilitate the development of more robust models.