Open-Set Semantic Segmentation for Point Clouds via Adversarial Prototype Framework
{kind=link}
Abstract
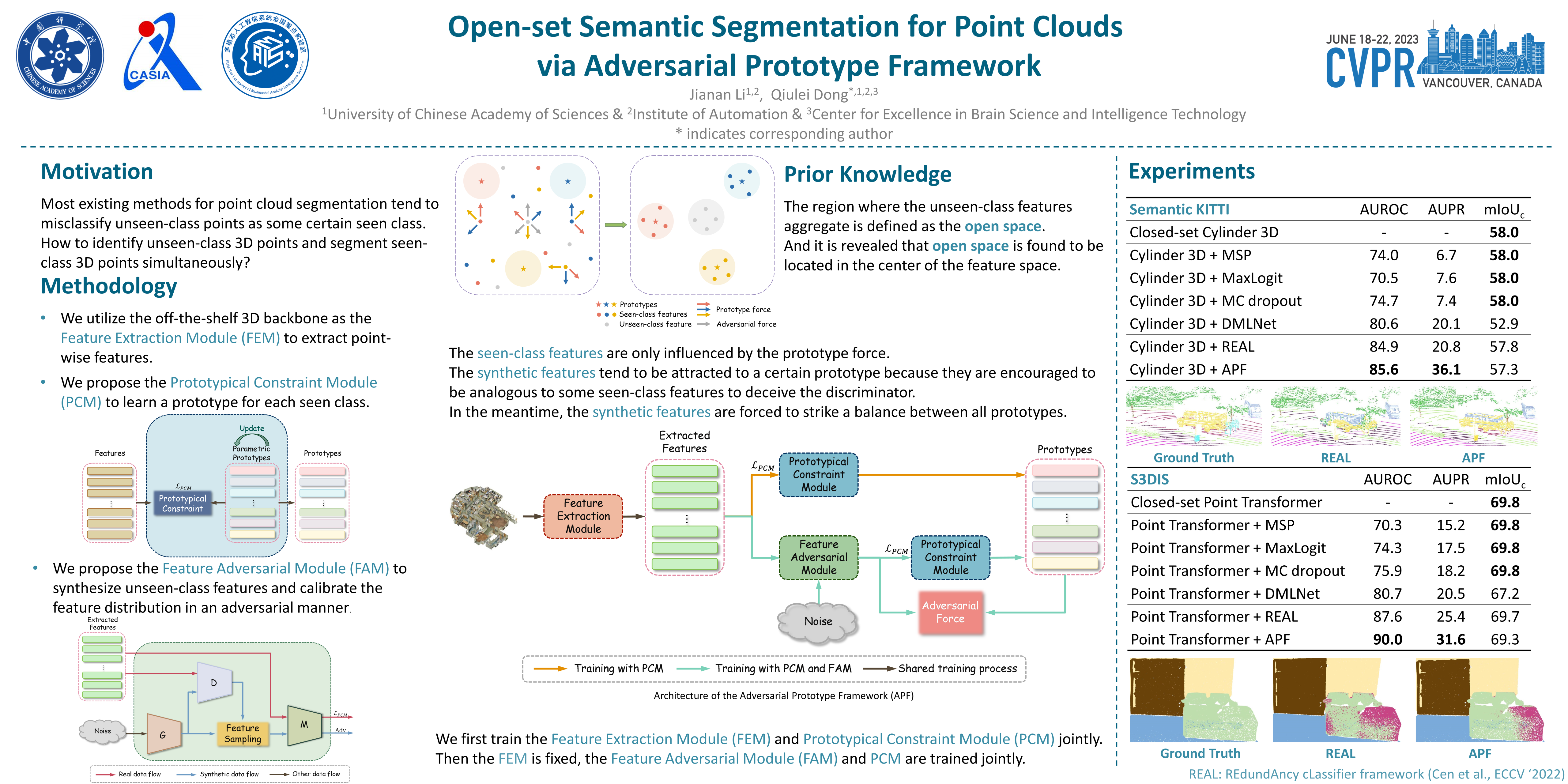
Recently, point cloud semantic segmentation has attracted much attention in computer vision. Most of the existing works in literature assume that the training and testing point clouds have the same object classes, but they are generally invalid in many real-world scenarios for identifying the 3D objects whose classes are not seen in the training set. To address this problem, we propose an Adversarial Prototype Framework (APF) for handling the open-set 3D semantic segmentation task, which aims to identify 3D unseen-class points while maintaining the segmentation performance on seen-class points. The proposed APF consists of a feature extraction module for extracting point features, a prototypical constraint module, and a feature adversarial module. The prototypical constraint module is designed to learn prototypes for each seen class from point features. The feature adversarial module utilizes generative adversarial networks to estimate the distribution of unseen-class features implicitly, and the synthetic unseen-class features are utilized to prompt the model to learn more effective point features and prototypes for discriminating unseen-class samples from the seen-class ones. Experimental results on two public datasets demonstrate that the proposed APF outperforms the comparative methods by a large margin in most cases.