CAMS: CAnonicalized Manipulation Spaces for Category-Level Functional Hand-Object Manipulation Synthesis
{kind=link}
Abstract
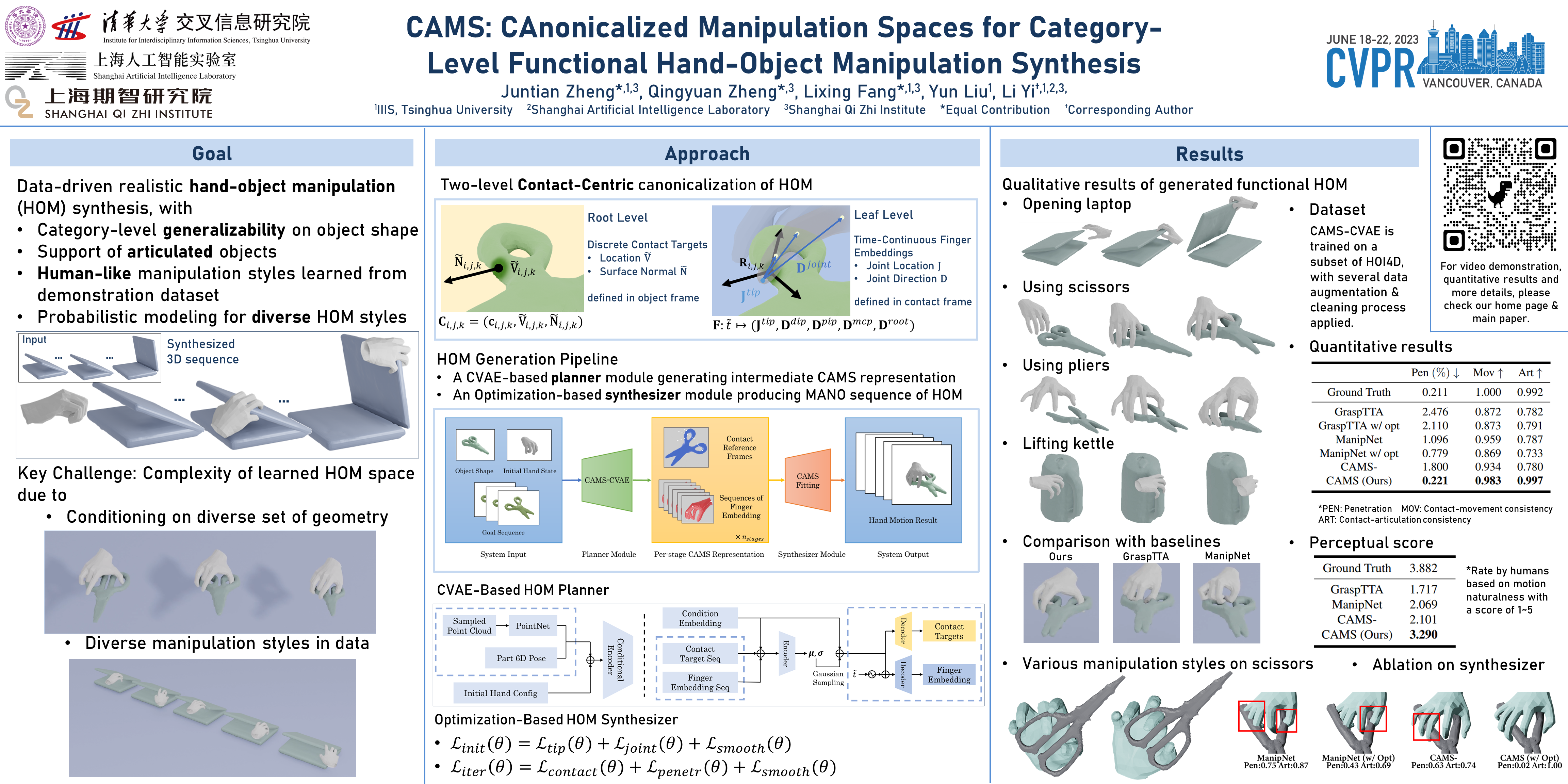
In this work, we focus on a novel task of category-level functional hand-object manipulation synthesis covering both rigid and articulated object categories. Given an object geometry, an initial human hand pose as well as a sparse control sequence of object poses, our goal is to generate a physically reasonable hand-object manipulation sequence that performs like human beings. To address such a challenge, we first design CAnonicalized Manipulation Spaces (CAMS), a two-level space hierarchy that canonicalizes the hand poses in an object-centric and contact-centric view. Benefiting from the representation capability of CAMS, we then present a two-stage framework for synthesizing human-like manipulation animations. Our framework achieves state-of-the-art performance for both rigid and articulated categories with impressive visual effects. Codes and video results can be found at our project homepage: https://cams-hoi.github.io/.