OVTrack: Open-Vocabulary Multiple Object Tracking
{kind=link}
Abstract
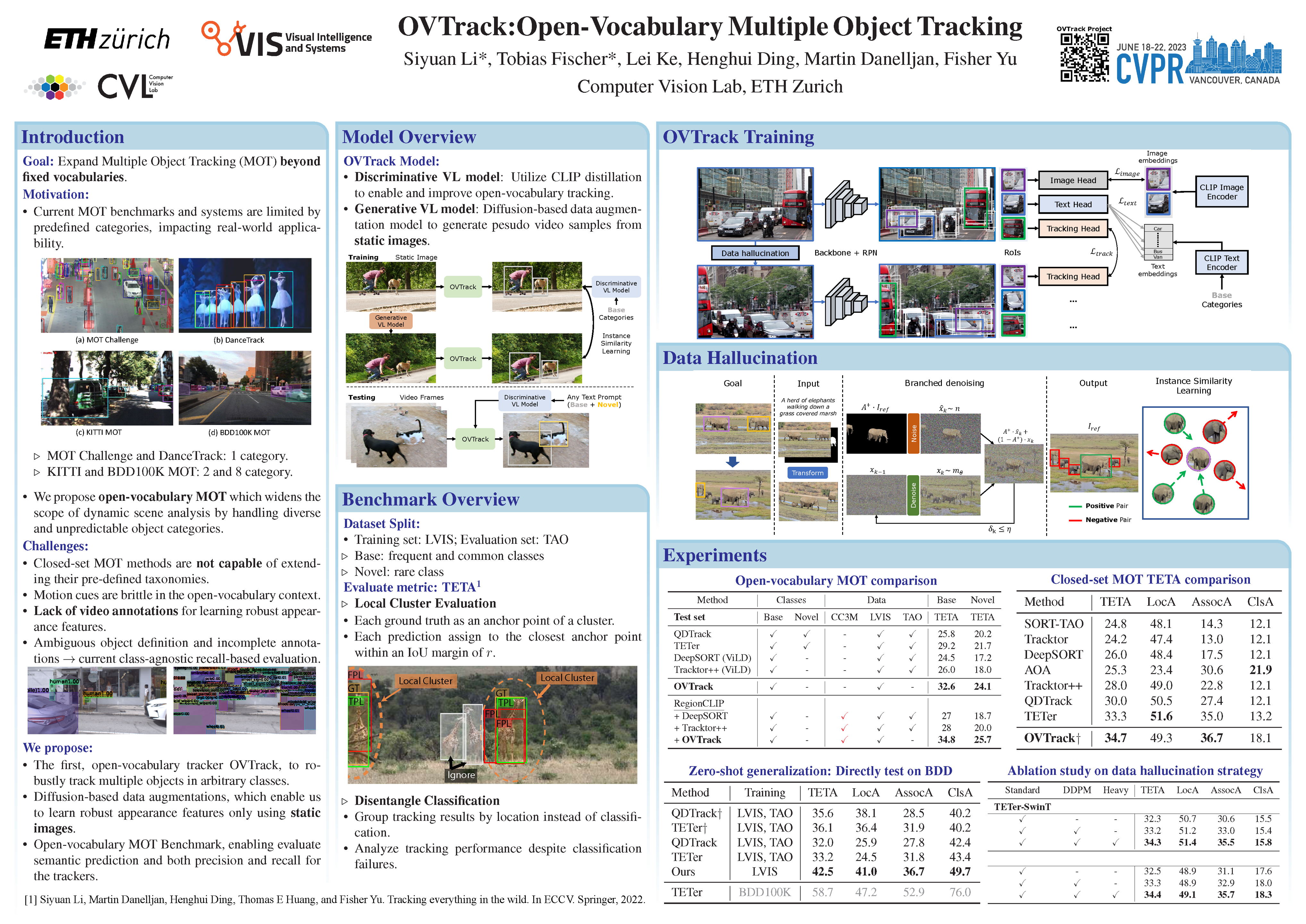
The ability to recognize, localize and track dynamic objects in a scene is fundamental to many real-world applications, such as self-driving and robotic systems. Yet, traditional multiple object tracking (MOT) benchmarks rely only on a few object categories that hardly represent the multitude of possible objects that are encountered in the real world. This leaves contemporary MOT methods limited to a small set of pre-defined object categories. In this paper, we address this limitation by tackling a novel task, open-vocabulary MOT, that aims to evaluate tracking beyond pre-defined training categories. We further develop OVTrack, an open-vocabulary tracker that is capable of tracking arbitrary object classes. Its design is based on two key ingredients: First, leveraging vision-language models for both classification and association via knowledge distillation; second, a data hallucination strategy for robust appearance feature learning from denoising diffusion probabilistic models. The result is an extremely data-efficient open-vocabulary tracker that sets a new state-of-the-art on the large-scale, large-vocabulary TAO benchmark, while being trained solely on static images. The project page is at https://www.vis.xyz/pub/ovtrack/.