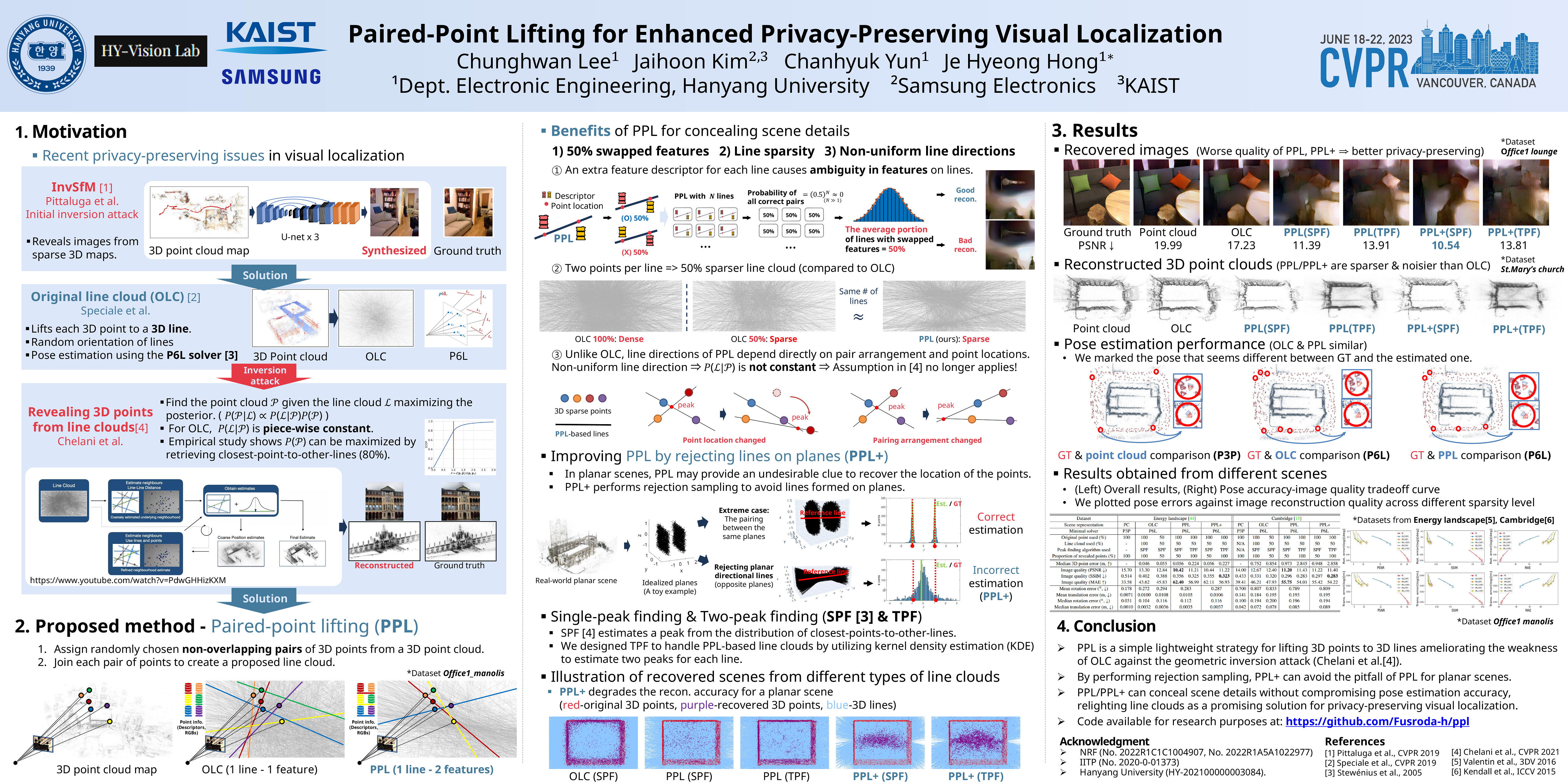
Paired-Point Lifting for Enhanced Privacy-Preserving Visual Localization
{kind=link}
Abstract
Visual localization refers to the process of recovering camera pose from input image relative to a known scene, forming a cornerstone of numerous vision and robotics systems. While many algorithms utilize sparse 3D point cloud of the scene obtained via structure-from-motion (SfM) for localization, recent studies have raised privacy concerns by successfully revealing high-fidelity appearance of the scene from such sparse 3D representation. One prominent approach for bypassing this attack was to lift 3D points to randomly oriented 3D lines thereby hiding scene geometry, but latest work have shown such random line cloud has a critical statistical flaw that can be exploited to break through protection. In this work, we present an alternative lightweight strategy called Paired-Point Lifting (PPL) for constructing 3D line clouds. Instead of drawing one randomly oriented line per 3D point, PPL splits 3D points into pairs and joins each pair to form 3D lines. This seemingly simple strategy yields 3 benefits, i) new ambiguity in feature selection, ii) increased line cloud sparsity, and iii) non-trivial distribution of 3D lines, all of which contributes to enhanced protection against privacy attacks. Extensive experimental results demonstrate the strength of PPL in concealing scene details without compromising localization accuracy, unlocking the true potential of 3D line clouds.