Progressive Spatio-Temporal Alignment for Efficient Event-Based Motion Estimation
{kind=link}
Abstract
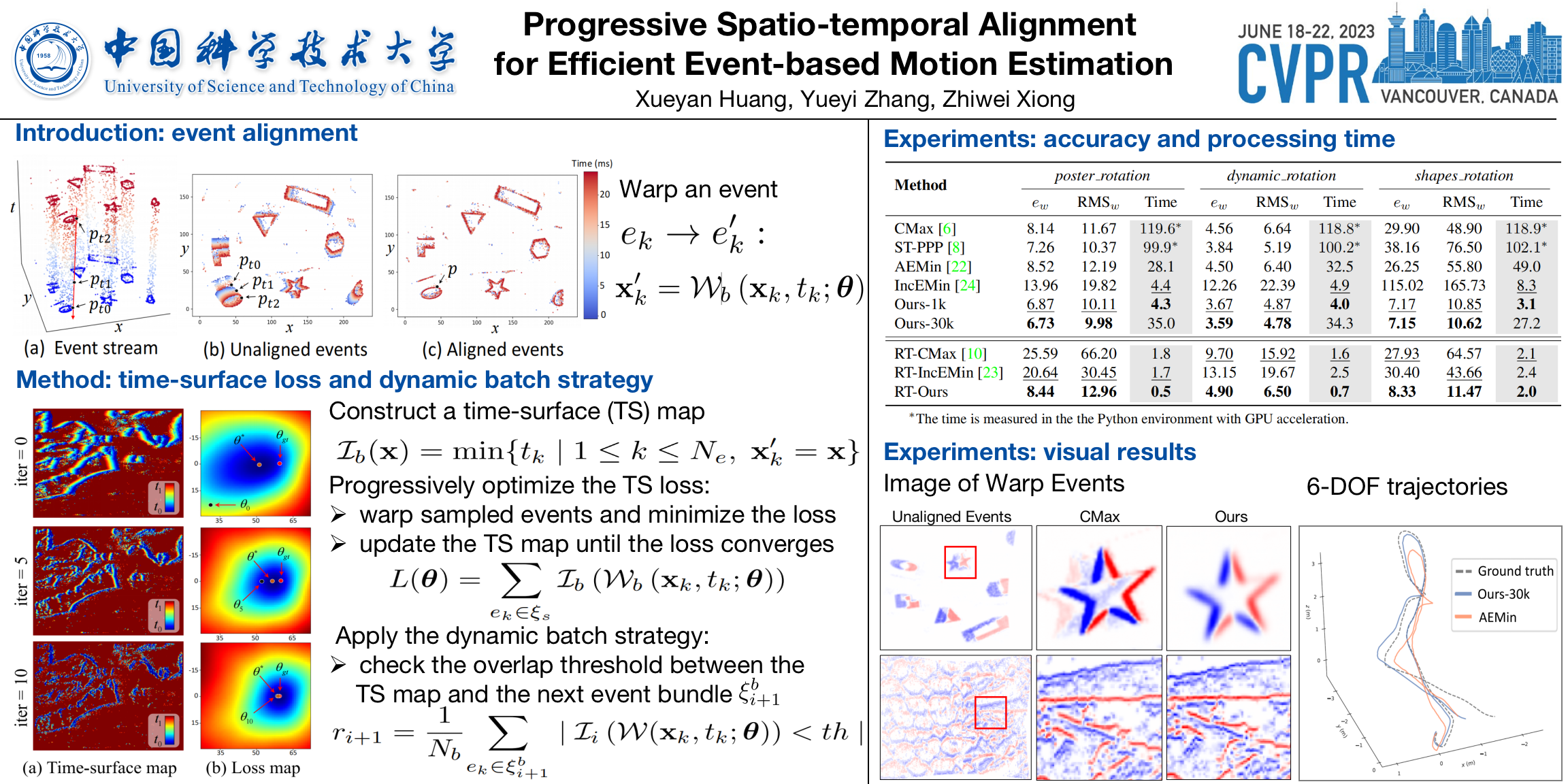
In this paper, we propose an efficient event-based motion estimation framework for various motion models. Different from previous works, we design a progressive event-to-map alignment scheme and utilize the spatio-temporal correlations to align events. In detail, we progressively align sampled events in an event batch to the time-surface map and obtain the updated motion model by minimizing a novel time-surface loss. In addition, a dynamic batch size strategy is applied to adaptively adjust the batch size so that all events in the batch are consistent with the current motion model. Our framework has three advantages: a) the progressive scheme refines motion parameters iteratively, achieving accurate motion estimation; b) within one iteration, only a small portion of events are involved in optimization, which greatly reduces the total runtime; c) the dynamic batch size strategy ensures that the constant velocity assumption always holds. We conduct comprehensive experiments to evaluate our framework on challenging high-speed scenes with three motion models: rotational, homography, and 6-DOF models. Experimental results demonstrate that our framework achieves state-of-the-art estimation accuracy and efficiency.