Layout-Based Causal Inference for Object Navigation
{kind=link}
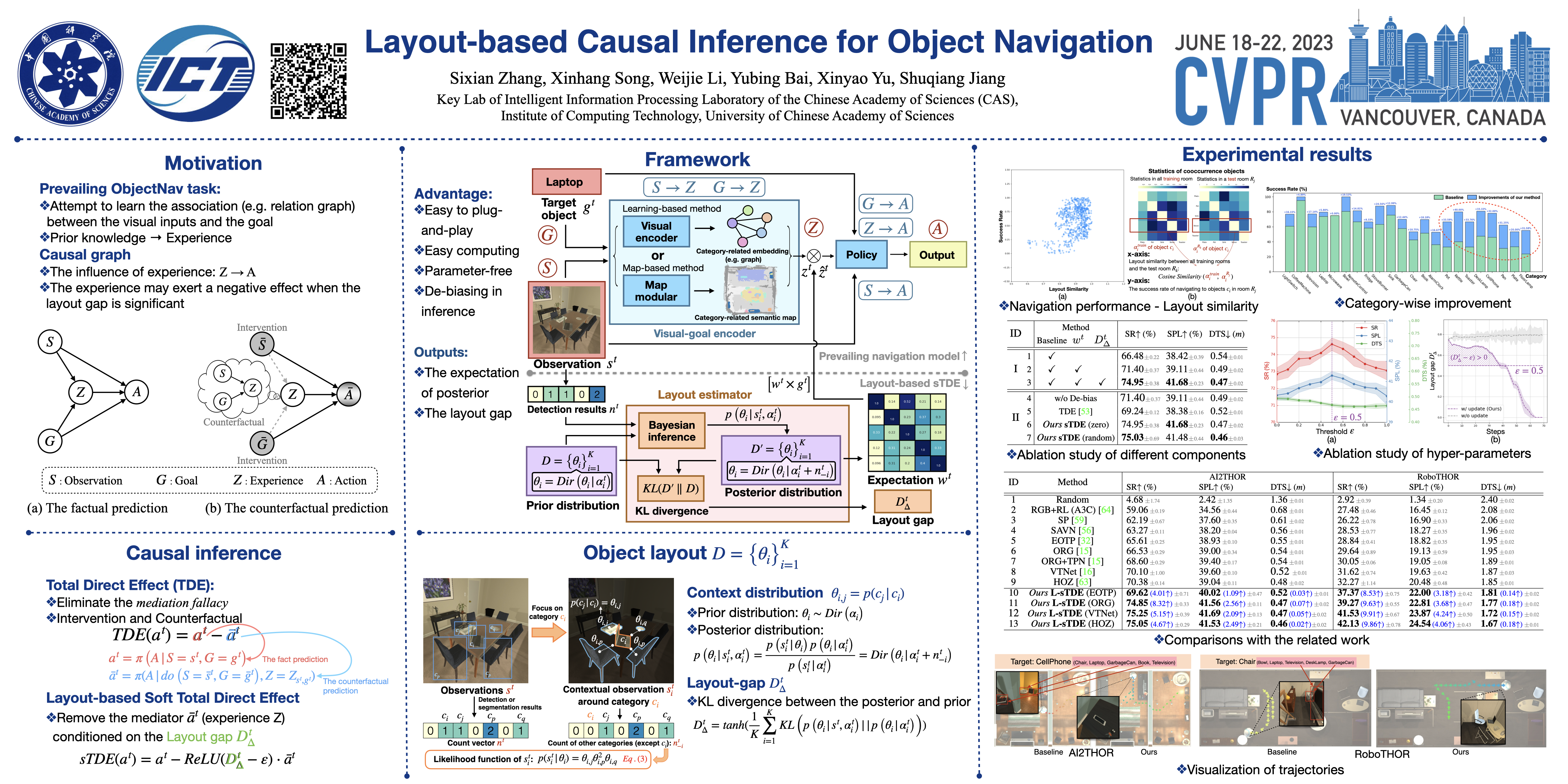
Abstract
Previous works for ObjectNav task attempt to learn the association (e.g. relation graph) between the visual inputs and the goal during training. Such association contains the prior knowledge of navigating in training environments, which is denoted as the experience. The experience performs a positive effect on helping the agent infer the likely location of the goal when the layout gap between the unseen environments of the test and the prior knowledge obtained in training is minor. However, when the layout gap is significant, the experience exerts a negative effect on navigation. Motivated by keeping the positive effect and removing the negative effect of the experience, we propose the layout-based soft Total Direct Effect (L-sTDE) framework based on the causal inference to adjust the prediction of the navigation policy. In particular, we propose to calculate the layout gap which is defined as the KL divergence between the posterior and the prior distribution of the object layout. Then the sTDE is proposed to appropriately control the effect of the experience based on the layout gap. Experimental results on AI2THOR, RoboTHOR, and Habitat demonstrate the effectiveness of our method.