Azimuth Super-Resolution for FMCW Radar in Autonomous Driving
{kind=link}
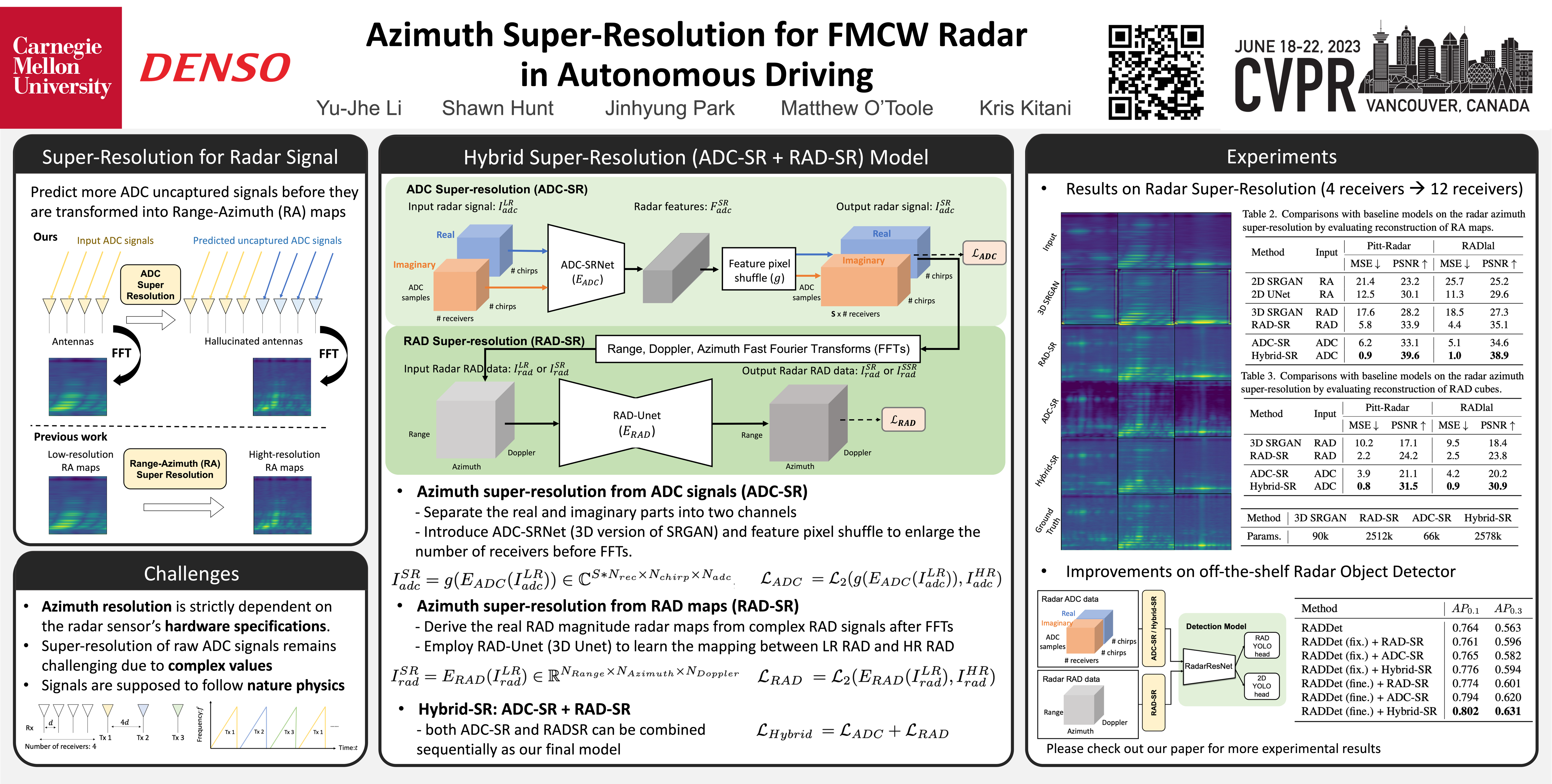
Abstract
We tackle the task of Azimuth (angular dimension) super-resolution for Frequency Modulated Continuous Wave (FMCW) multiple-input multiple-output (MIMO) radar. FMCW MIMO radar is widely used in autonomous driving alongside Lidar and RGB cameras. However, compared to Lidar, MIMO radar is usually of low resolution due to hardware size restrictions. For example, achieving 1-degree azimuth resolution requires at least 100 receivers, but a single MIMO device usually supports at most 12 receivers. Having limitations on the number of receivers is problematic since a high-resolution measurement of azimuth angle is essential for estimating the location and velocity of objects. To improve the azimuth resolution of MIMO radar, we propose a light, yet efficient, Analog-to-Digital super-resolution model (ADC-SR) that predicts or hallucinates additional radar signals using signals from only a few receivers. Compared with the baseline models that are applied to processed radar Range-Azimuth-Doppler (RAD) maps, we show that our ADC-SR method that processes raw ADC signals achieves comparable performance with 98% (50 times) fewer parameters. We also propose a hybrid super-resolution model (Hybrid-SR) combining our ADC-SR with a standard RAD super-resolution model, and show that performance can be improved by a large margin. Experiments on our City-Radar dataset and the RADIal dataset validate the importance of leveraging raw radar ADC signals. To assess the value of our super-resolution model for autonomous driving, we also perform object detection on the results of our super-resolution model and find that our super-resolution model improves detection performance by around 4% in mAP.