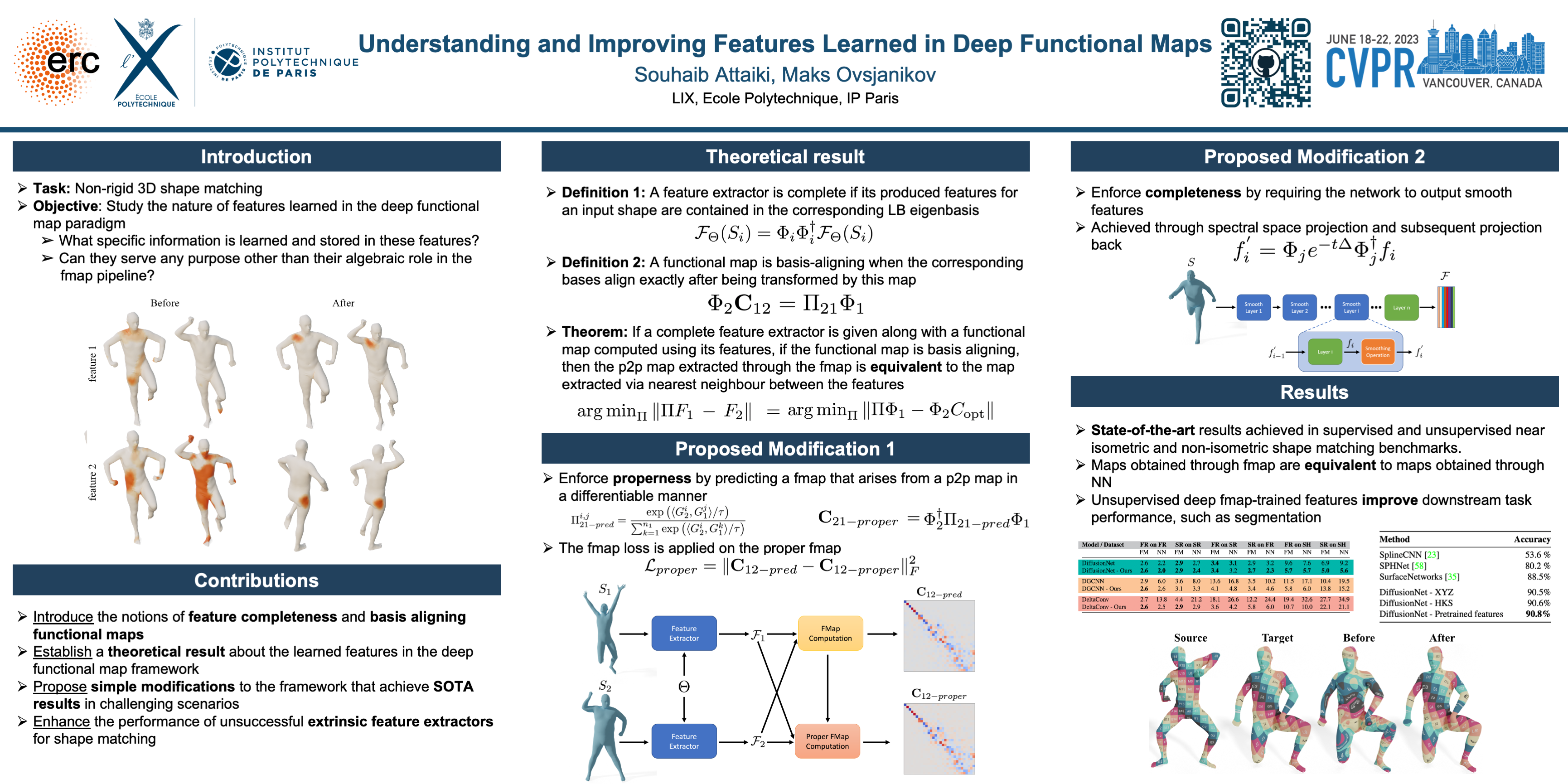
Understanding and Improving Features Learned in Deep Functional Maps
 Highlight
Highlight
{kind=link}
Abstract
Deep functional maps have recently emerged as a successful paradigm for non-rigid 3D shape correspondence tasks. An essential step in this pipeline consists in learning feature functions that are used as constraints to solve for a functional map inside the network. However, the precise nature of the information learned and stored in these functions is not yet well understood. Specifically, a major question is whether these features can be used for any other objective, apart from their purely algebraic role, in solving for functional map matrices. In this paper, we show that under some mild conditions, the features learned within deep functional map approaches can be used as point-wise descriptors and thus are directly comparable across different shapes, even without the necessity of solving for a functional map at test time. Furthermore, informed by our analysis, we propose effective modifications to the standard deep functional map pipeline, which promotes structural properties of learned features, significantly improving the matching results. Finally, we demonstrate that previously unsuccessful attempts at using extrinsic architectures for deep functional map feature extraction can be remedied via simple architectural changes, which promote the theoretical properties suggested by our analysis. We thus bridge the gap between intrinsic and extrinsic surface-based learning, suggesting the necessary and sufficient conditions for successful shape matching. Our code is available at https://github.com/pvnieo/clover.