MSeg3D: Multi-Modal 3D Semantic Segmentation for Autonomous Driving
{kind=link}
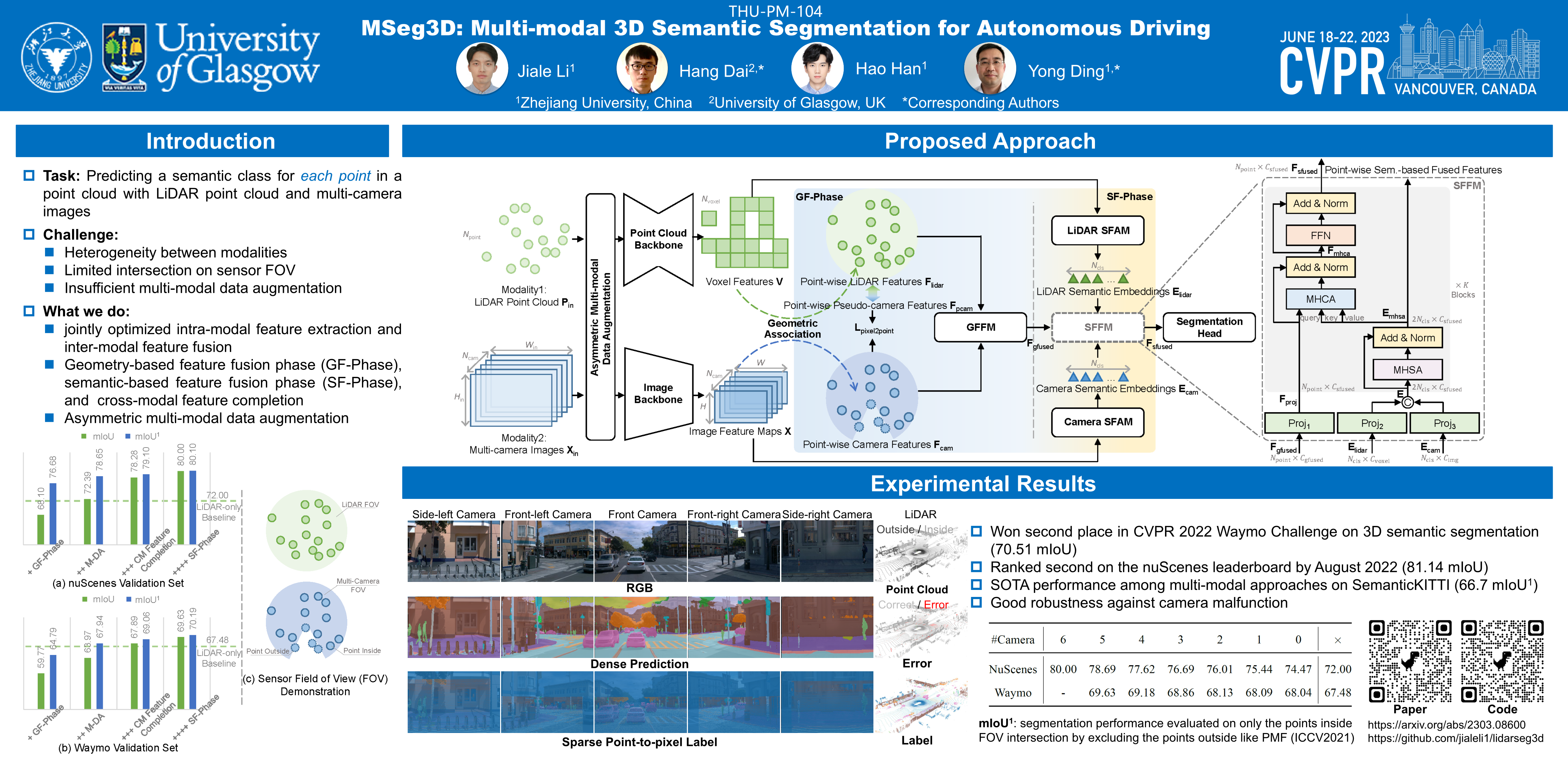
Abstract
LiDAR and camera are two modalities available for 3D semantic segmentation in autonomous driving. The popular LiDAR-only methods severely suffer from inferior segmentation on small and distant objects due to insufficient laser points, while the robust multi-modal solution is under-explored, where we investigate three crucial inherent difficulties: modality heterogeneity, limited sensor field of view intersection, and multi-modal data augmentation. We propose a multi-modal 3D semantic segmentation model (MSeg3D) with joint intra-modal feature extraction and inter-modal feature fusion to mitigate the modality heterogeneity. The multi-modal fusion in MSeg3D consists of geometry-based feature fusion GF-Phase, cross-modal feature completion, and semantic-based feature fusion SF-Phase on all visible points. The multi-modal data augmentation is reinvigorated by applying asymmetric transformations on LiDAR point cloud and multi-camera images individually, which benefits the model training with diversified augmentation transformations. MSeg3D achieves state-of-the-art results on nuScenes, Waymo, and SemanticKITTI datasets. Under the malfunctioning multi-camera input and the multi-frame point clouds input, MSeg3D still shows robustness and improves the LiDAR-only baseline. Our code is publicly available at https://github.com/jialeli1/lidarseg3d.