BUFFER: Balancing Accuracy, Efficiency, and Generalizability in Point Cloud Registration
{kind=link}
Abstract
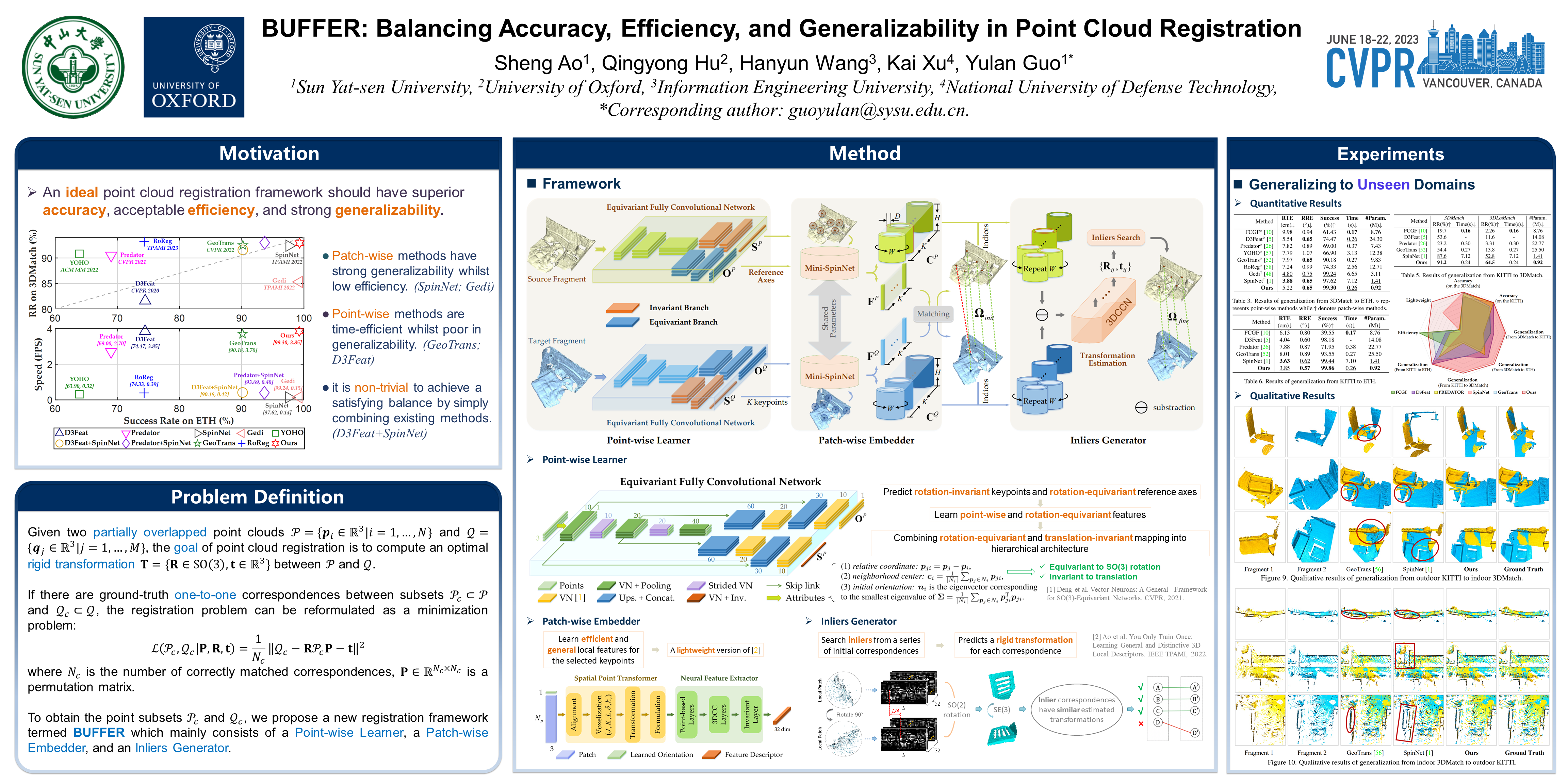
An ideal point cloud registration framework should have superior accuracy, acceptable efficiency, and strong generalizability. However, this is highly challenging since existing registration techniques are either not accurate enough, far from efficient, or generalized poorly. It remains an open question that how to achieve a satisfying balance between this three key elements. In this paper, we propose BUFFER, a point cloud registration method for balancing accuracy, efficiency, and generalizability. The key to our approach is to take advantage of both point-wise and patch-wise techniques, while overcoming the inherent drawbacks simultaneously. Different from a simple combination of existing methods, each component of our network has been carefully crafted to tackle specific issues. Specifically, a Point-wise Learner is first introduced to enhance computational efficiency by predicting keypoints and improving the representation capacity of features by estimating point orientations, a Patch-wise Embedder which leverages a lightweight local feature learner is then deployed to extract efficient and general patch features. Additionally, an Inliers Generator which combines simple neural layers and general features is presented to search inlier correspondences. Extensive experiments on real-world scenarios demonstrate that our method achieves the best of both worlds in accuracy, efficiency, and generalization. In particular, our method not only reaches the highest success rate on unseen domains, but also is almost 30 times faster than the strong baselines specializing in generalization. Code is available at https://github.com/aosheng1996/BUFFER.