Pointersect: Neural Rendering With Cloud-Ray Intersection
{kind=link}
Abstract
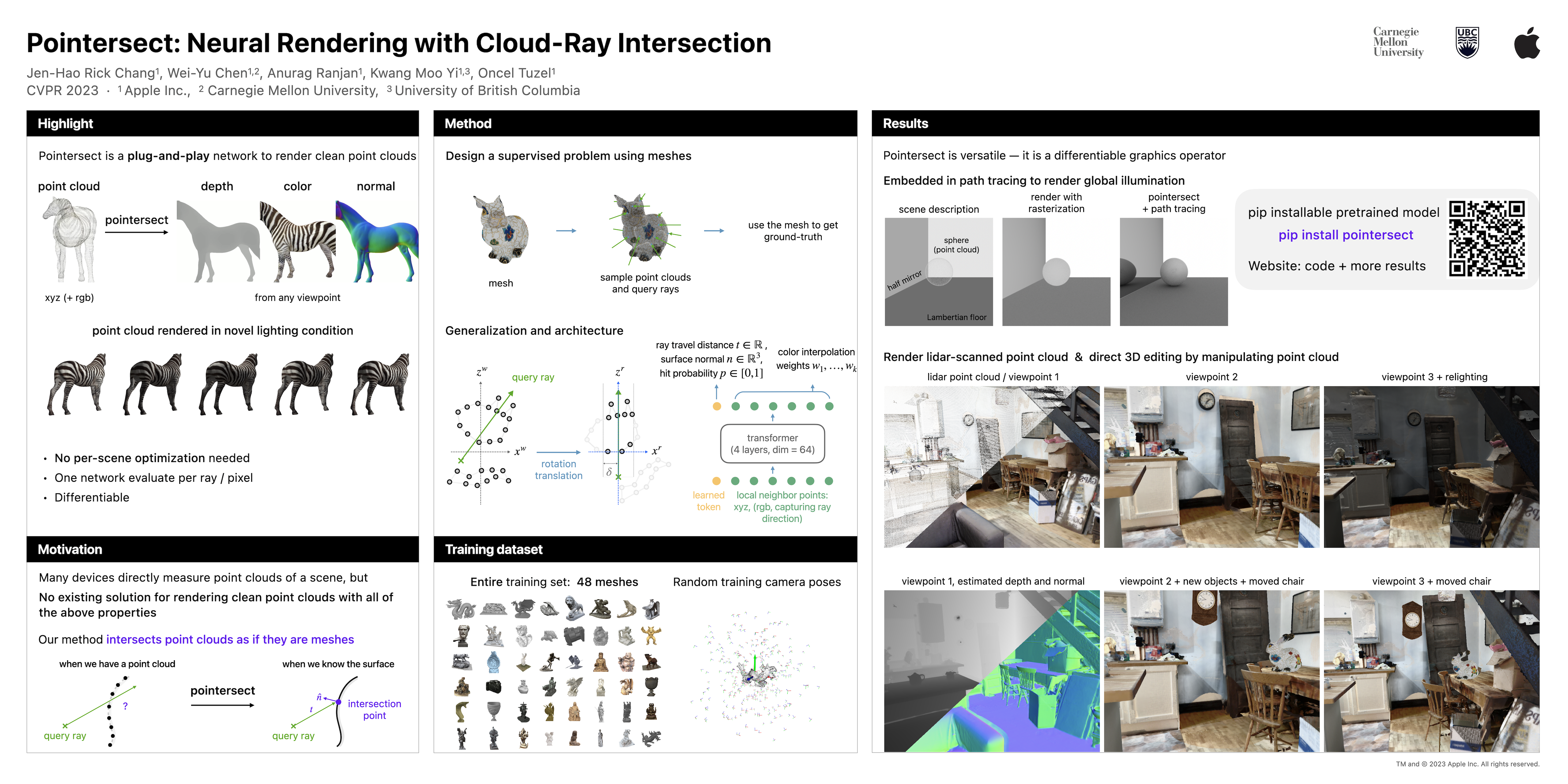
We propose a novel method that renders point clouds as if they are surfaces. The proposed method is differentiable and requires no scene-specific optimization. This unique capability enables, out-of-the-box, surface normal estimation, rendering room-scale point clouds, inverse rendering, and ray tracing with global illumination. Unlike existing work that focuses on converting point clouds to other representations--e.g., surfaces or implicit functions--our key idea is to directly infer the intersection of a light ray with the underlying surface represented by the given point cloud. Specifically, we train a set transformer that, given a small number of local neighbor points along a light ray, provides the intersection point, the surface normal, and the material blending weights, which are used to render the outcome of this light ray. Localizing the problem into small neighborhoods enables us to train a model with only 48 meshes and apply it to unseen point clouds. Our model achieves higher estimation accuracy than state-of-the-art surface reconstruction and point-cloud rendering methods on three test sets. When applied to room-scale point clouds, without any scene-specific optimization, the model achieves competitive quality with the state-of-the-art novel-view rendering methods. Moreover, we demonstrate ability to render and manipulate Lidar-scanned point clouds such as lighting control and object insertion.