TexPose: Neural Texture Learning for Self-Supervised 6D Object Pose Estimation
{kind=link}
Abstract
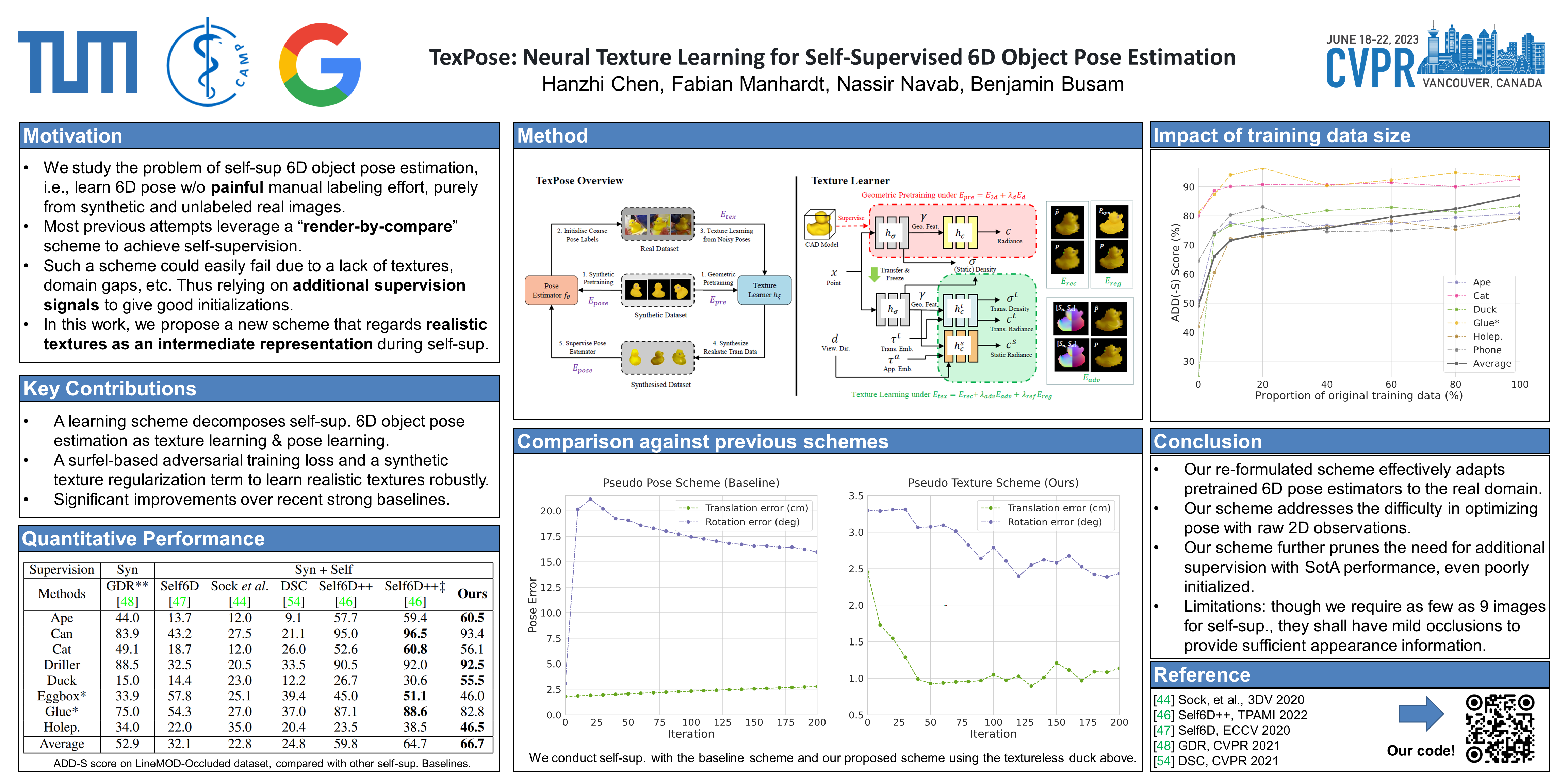
In this paper, we introduce neural texture learning for 6D object pose estimation from synthetic data and a few unlabelled real images. Our major contribution is a novel learning scheme which removes the drawbacks of previous works, namely the strong dependency on co-modalities or additional refinement. These have been previously necessary to provide training signals for convergence. We formulate such a scheme as two sub-optimisation problems on texture learning and pose learning. We separately learn to predict realistic texture of objects from real image collections and learn pose estimation from pixel-perfect synthetic data. Combining these two capabilities allows then to synthesise photorealistic novel views to supervise the pose estimator with accurate geometry. To alleviate pose noise and segmentation imperfection present during the texture learning phase, we propose a surfel-based adversarial training loss together with texture regularisation from synthetic data. We demonstrate that the proposed approach significantly outperforms the recent state-of-the-art methods without ground-truth pose annotations and demonstrates substantial generalisation improvements towards unseen scenes. Remarkably, our scheme improves the adopted pose estimators substantially even when initialised with much inferior performance.