Pose Synchronization Under Multiple Pair-Wise Relative Poses
{kind=link}
Abstract
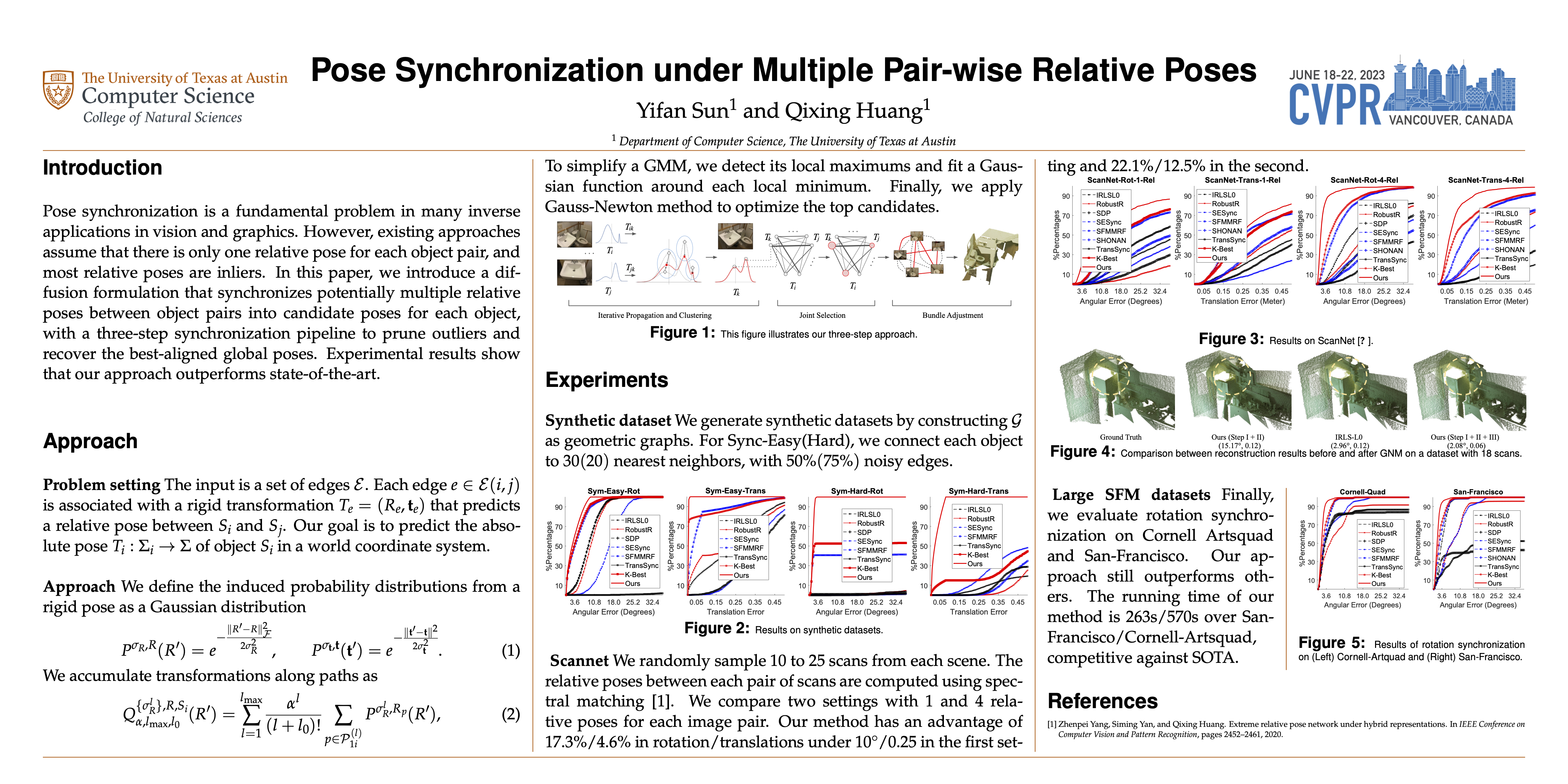
Pose synchronization, which seeks to estimate consistent absolute poses among a collection of objects from noisy relative poses estimated between pairs of objects in isolation, is a fundamental problem in many inverse applications. This paper studies an extreme setting where multiple relative pose estimates exist between each object pair, and the majority is incorrect. Popular methods that solve pose synchronization via recovering a low-rank matrix that encodes relative poses in block fail under this extreme setting. We introduce a three-step algorithm for pose synchronization under multiple relative pose inputs. The first step performs diffusion and clustering to compute the candidate poses of the input objects. We present a theoretical result to justify our diffusion formulation. The second step jointly optimizes the best pose for each object. The final step refines the output of the second step. Experimental results on benchmark datasets of structurefrom-motion and scan-based geometry reconstruction show that our approach offers more accurate absolute poses than state-of-the-art pose synchronization techniques.