ReCoRe: Regularized Contrastive Representation Learning of World Model
{kind=link}
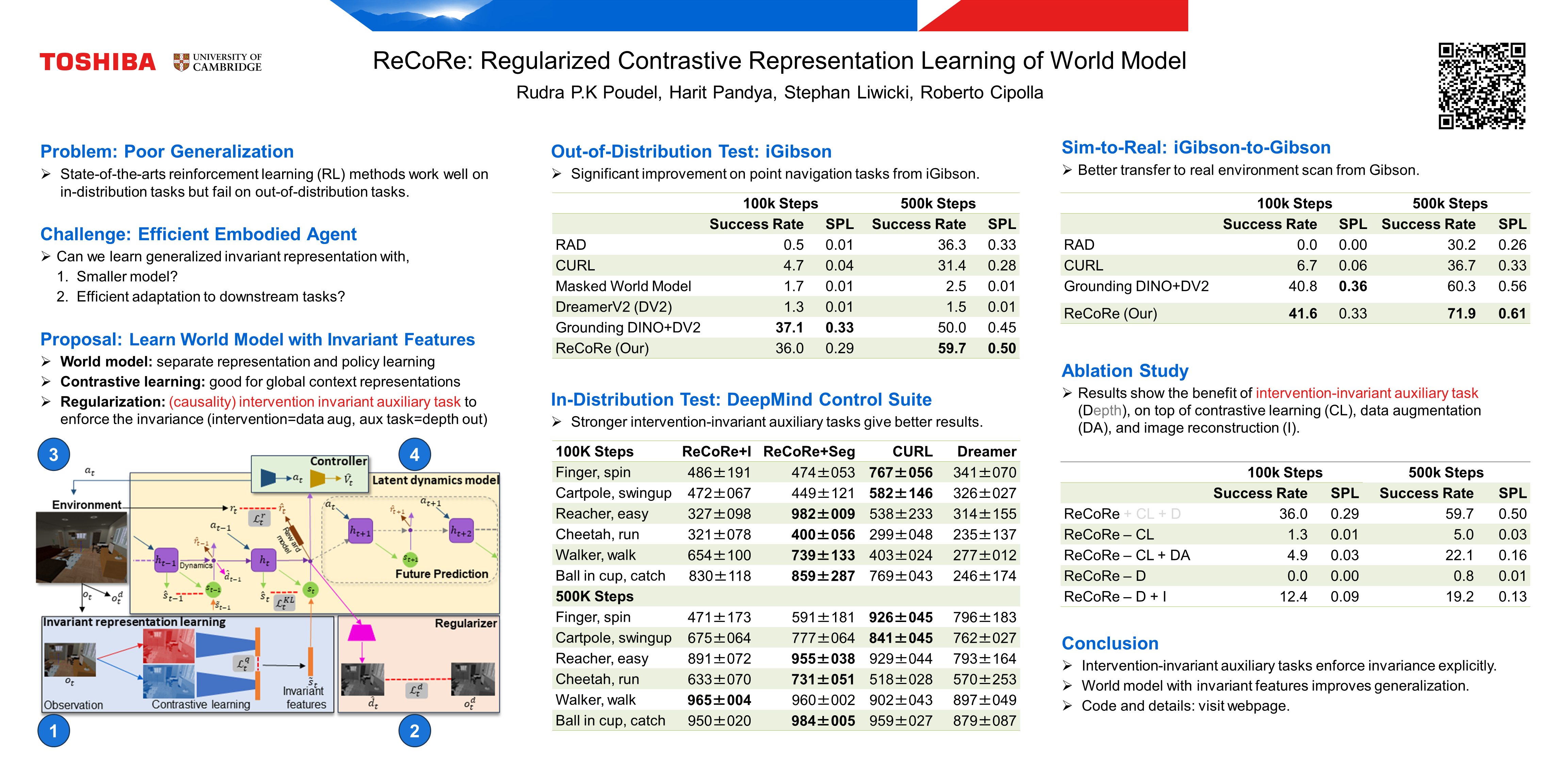
Abstract
While recent model-free Reinforcement Learning (RL) methods have demonstrated human-level effectiveness in gaming environments, their success in everyday tasks like visual navigation has been limited, particularly under significant appearance variations. This limitation arises from (i) poor sample efficiency and (ii) over-fitting to training scenarios. To address these challenges, we present a world model that learns invariant features using (i) contrastive unsupervised learning and (ii) an intervention-invariant regularizer. Learning an explicit representation of the world dynamics i.e. a world model, improves sample efficiency while contrastive learning implicitly enforces learning of invariant features, which improves generalization. However, the na\"ive integration of contrastive loss to world models fails due to a lack of supervisory signals to the visual encoder, as world-model-based RL methods independently optimize representation learning and agent policy. To overcome this issue, we propose an intervention-invariant regularizer in the form of an auxiliary task such as depth prediction, image denoising, etc., that explicitly enforces invariance to style-interventions. Our method outperforms current state-of-the-art model-based and model-free RL methods and significantly on out-of-distribution point navigation task evaluated on the iGibson benchmark. We further demonstrate that our approach, with only visual observations, outperforms recent language-guided foundation models for point navigation, which is essential for deployment on robots with limited computation capabilities. Finally, we demonstrate that our proposed model excels at the sim-to-real transfer of its perception module on Gibson benchmark.