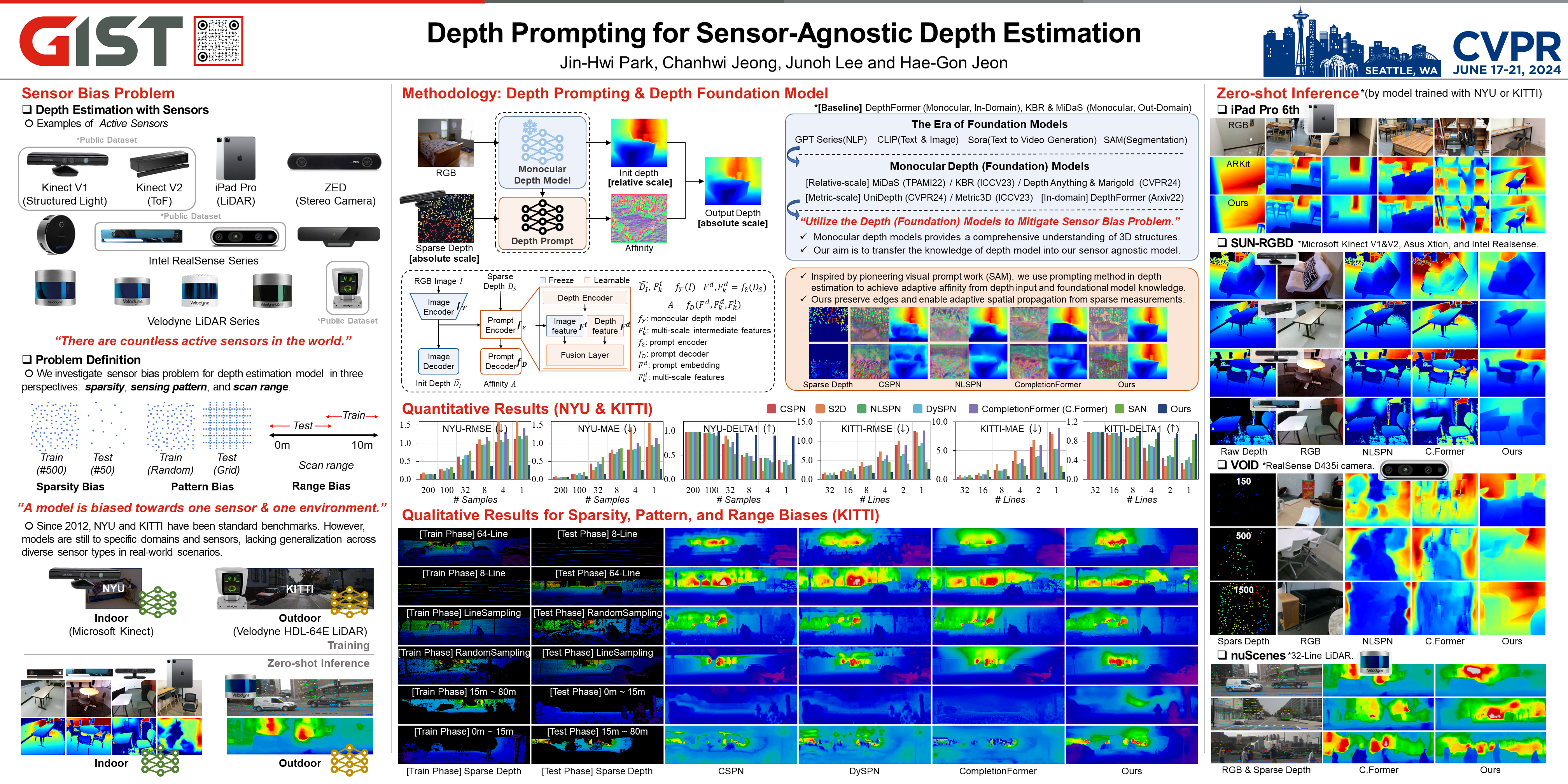
Depth Prompting for Sensor-Agnostic Depth Estimation
{kind=link}
Abstract
Dense depth maps have been used as a key element of visual perception tasks. There have been tremendous efforts to enhance the depth quality, ranging from optimization-based to learning-based methods. Despite the remarkable progress for a long time, their applicability in the real world is limited due to systematic measurement biases such as density, sensing pattern, and scan range. It is well-known that the biases make it difficult for these methods to achieve their generalization. We observe that learning a joint representation for input modalities (e.g., images and depth), which most recent methods adopt, is sensitive to the biases. In this work, we disentangle those modalities to mitigate the biases with prompt engineering. For this, we design a novel depth prompt module to allow the desirable feature representation according to new depth distributions from either sensor types or scene configurations. Our depth prompt can be embedded into foundation models for monocular depth estimation. Through this embedding process, our method helps the pretrained model to be free from restraint of depth scan range and to provide absolute scale depth maps. We demonstrate the effectiveness of our method through extensive evaluations. Source code is publicly available at https://github.com/JinhwiPark/DepthPrompting.