SpiderMatch: 3D Shape Matching with Global Optimality and Geometric Consistency
{kind=link}
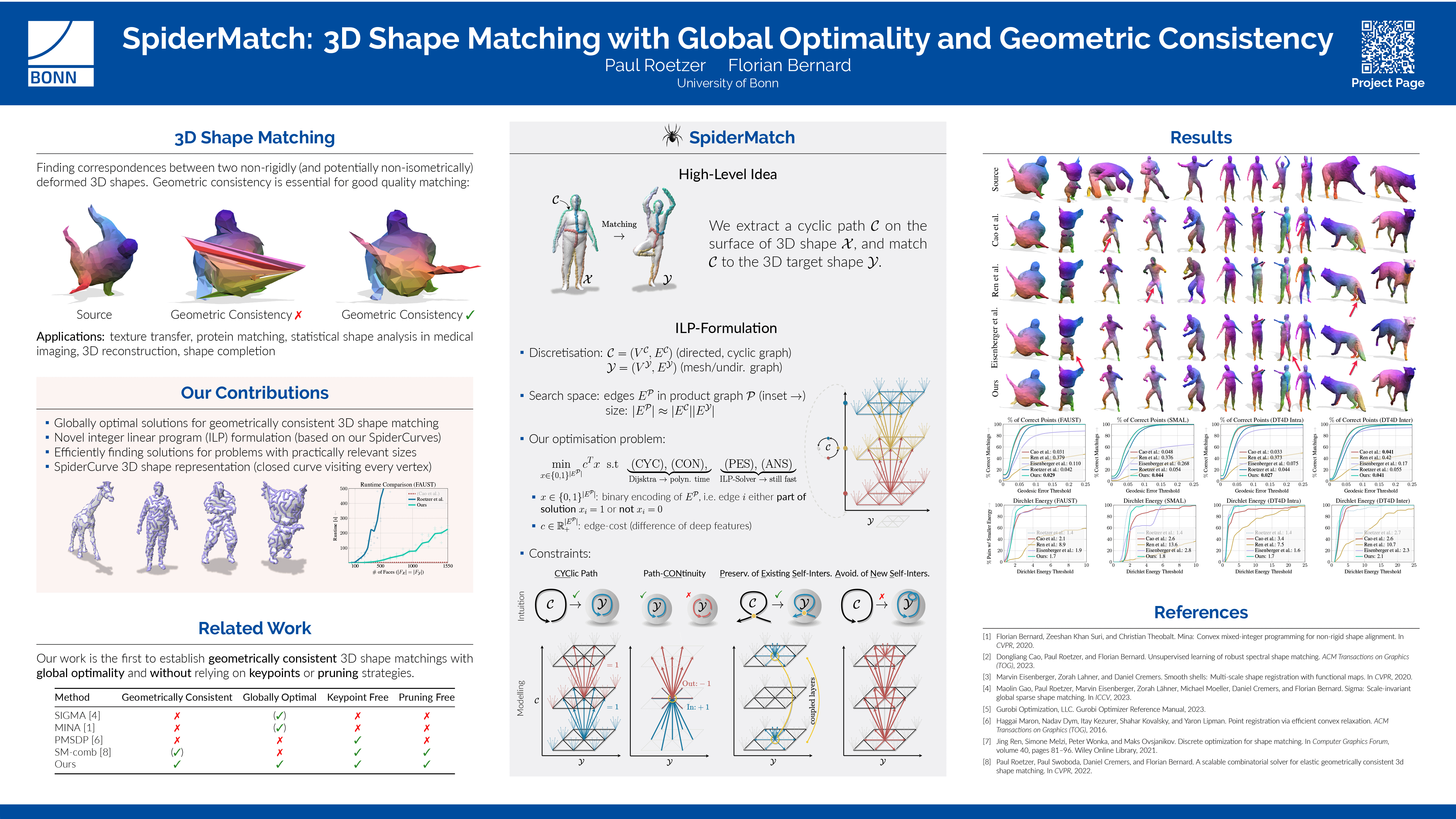
Abstract
Finding shortest paths on product spaces is a popular approach to tackle numerous variants of matching problems, including the dynamic time warping method for matching signals, the matching of curves, or the matching of a curve to a 3D shape. While these approaches admit the computation of globally optimal solutions in polynomial time, their natural generalisation to 3D shape matching is widely known to be intractable. In this work we address this issue by proposing a novel path-based formalism for 3D shape matching. More specifically, we consider an alternative shape discretisation in which one of the 3D shapes (the source shape) is represented as a SpiderCurve, i.e. a long self-intersecting curve that traces the 3D shape surface. We then tackle the 3D shape matching problem as finding a shortest path in the product graph of the SpiderCurve and the target 3D shape. Our approach introduces a set of novel constraints that ensure a globally geometrically consistent matching. Overall, our formalism leads to an integer linear programming problem for which we experimentally show that it can efficiently be solved to global optimality. We demonstrate that our approach is competitive with recent state-of-the-art shape matching methods, while in addition guaranteeing geometric consistency.