From a Bird's Eye View to See: Joint Camera and Subject Registration without the Camera Calibration
{kind=link}
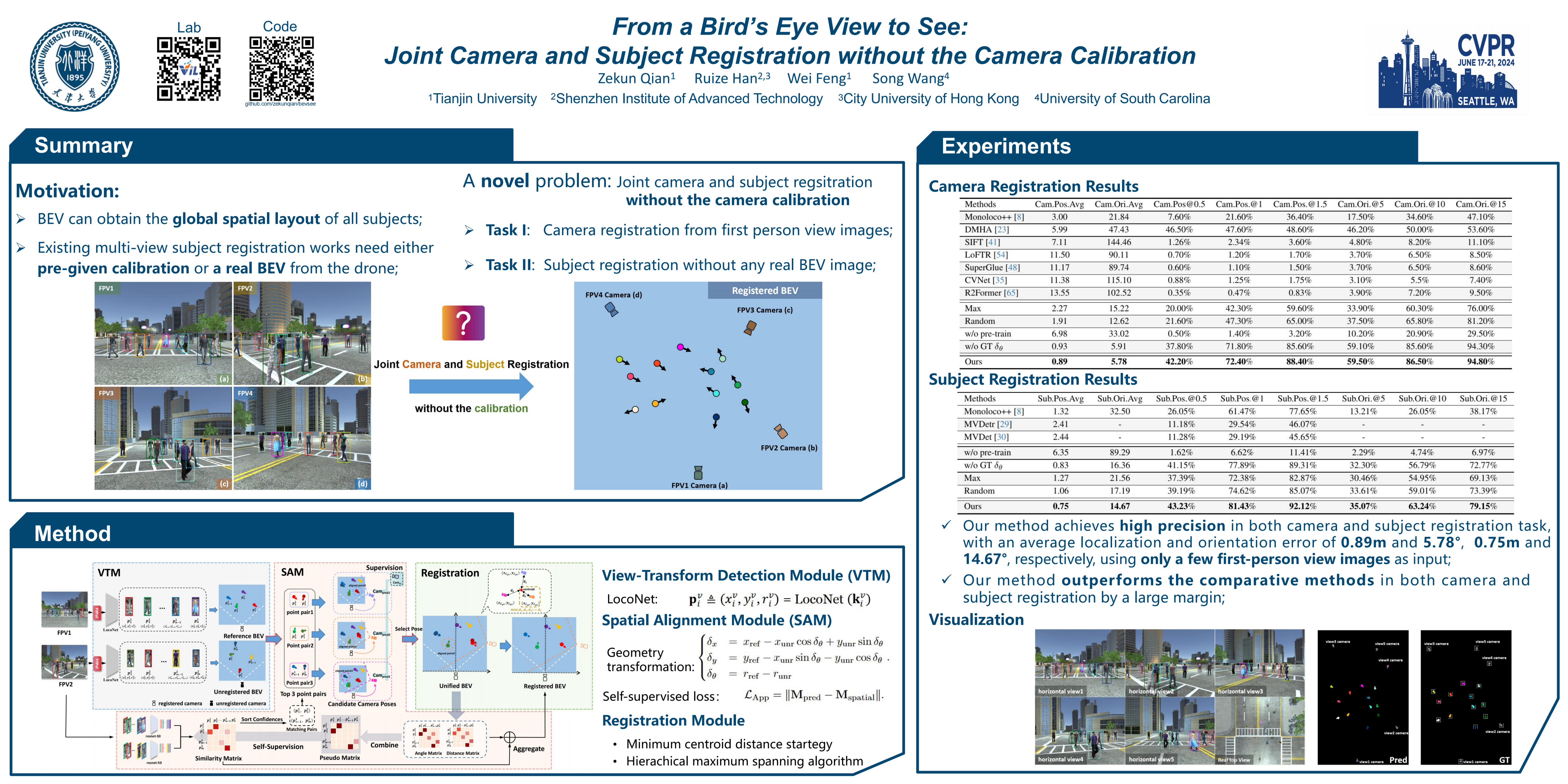
Abstract
We tackle a new problem of multi-view camera and subject registration in the bird's eye view (BEV) without pre-given camera calibration, which promotes the multi-view subject registration problem to a new calibration-free stage. This greatly alleviates the limitation in many practical applications. However, this is a very challenging problem since its only input is several RGB images from different first-person views (FPVs) for a multi-person scene, without the BEV image and the calibration of the FPVs, while the output is a unified plane aggregated from all views with the positions and orientations of both the subjects and cameras in a BEV. For this purpose, we propose an end-to-end framework solving camera and subject registration together by taking advantage of their mutual dependence, whose main idea is as below: i) creating a subject view-transform module (VTM) to project each pedestrian from FPV to a virtual BEV, ii) deriving a multi-view geometry-based spatial alignment module (SAM) to estimate the relative camera pose in a unified BEV, iii) selecting and refining the subject and camera registration results within the unified BEV. We collect a new large-scale synthetic dataset with rich annotations for training and evaluation. Additionally, we also collect a real dataset for cross-domain evaluation. The experimental results show the remarkable effectiveness of our method. We will release the dataset and code to the public.