Visual-Augmented Dynamic Semantic Prototype for Generative Zero-Shot Learning
{kind=link}
Abstract
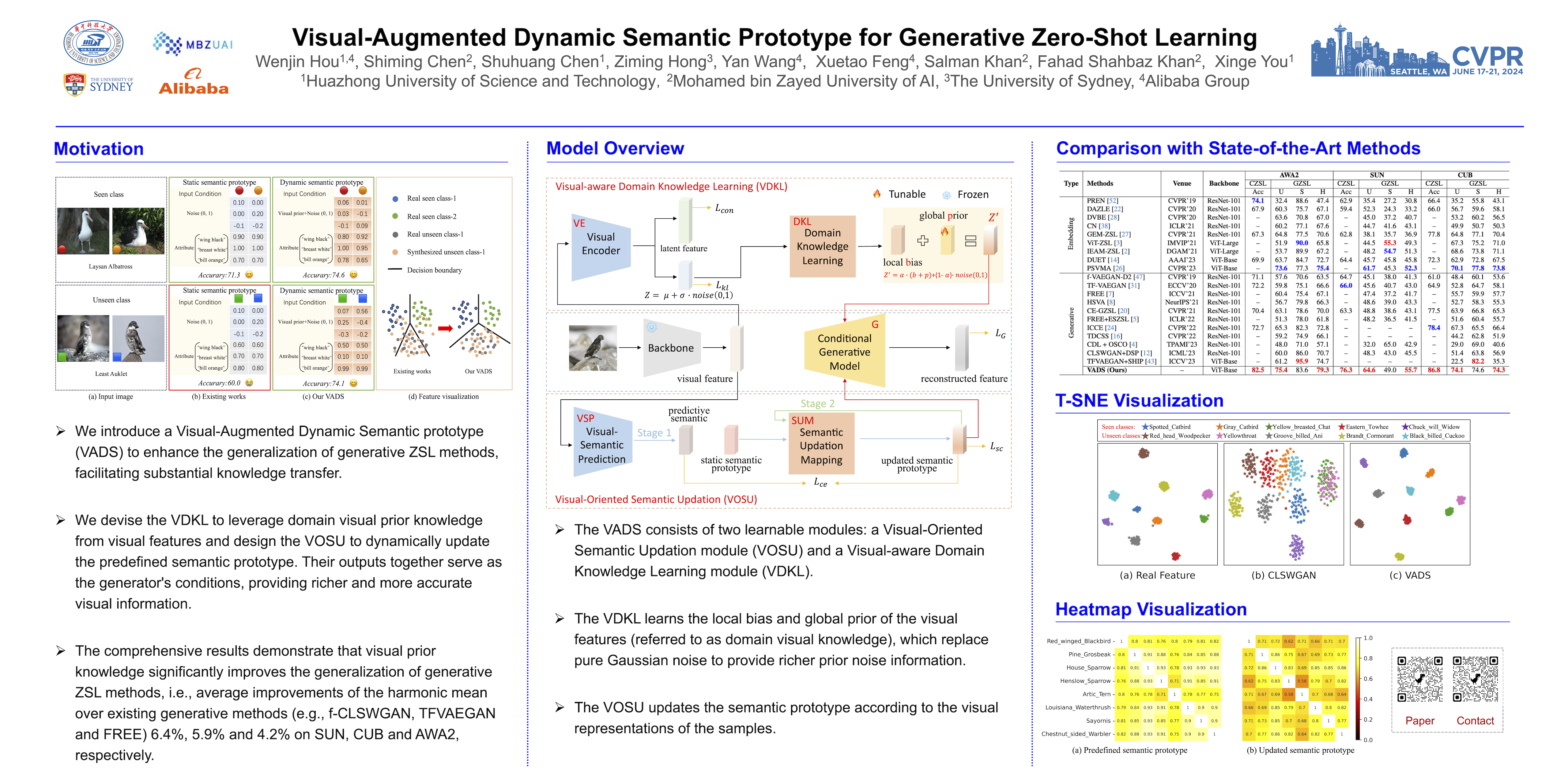
Generative Zero-Shot Learning (ZSL) learns a generator to synthesize visual samples for unseen classes, which is an effective way to advance ZSL. However, existing generative methods rely on the conditions of Gaussian noise and the predefined semantic prototype, which limit the generator only optimized on specific seen classes rather than characterizing each visual instance, resulting in poor generalizations (e.g., overfitting to seen classes). To address this issue, we propose a novel Visual-Augmented Dynamic Semantic prototype method (termed VADS) to boost the generator to learn accurate semantic-visual mapping by fully exploiting the visual-augmented knowledge into semantic conditions. In detail, VADS consists of two modules: (1) Visual-aware Domain Knowledge Learning module (VDKL) learns the local bias and global prior of the visual features (referred to as domain visual knowledge), which replace pure Gaussian noise to provide richer prior noise information; (2) Vision-Oriented Semantic Updation module (VOSU) updates the semantic prototype according to the visual representations of the samples. Ultimately, we concatenate their output as a dynamic semantic prototype, which serves as the condition of the generator. Extensive experiments demonstrate that our VADS achieves superior CZSL and GZSL performances on three prominent datasets and outperforms other state-of-the-art methods with averaging increases by 6.4\%, 5.9\% and 4.2\% on SUN, CUB and AWA2, respectively.