READ: Retrieval-Enhanced Asymmetric Diffusion for Motion Planning
{kind=link}
Abstract
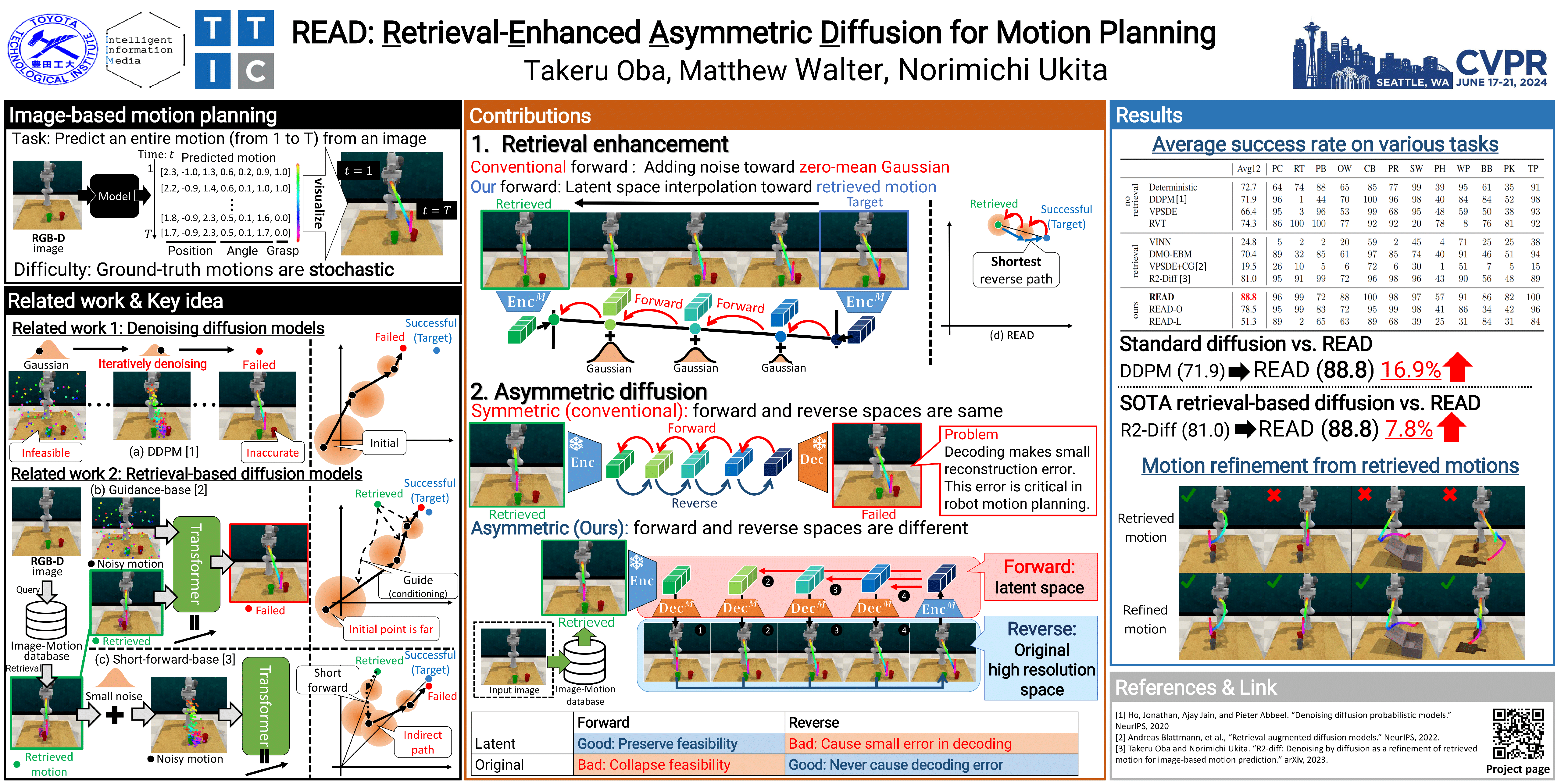
This paper proposes Retrieval-Enhanced Asymmetric Diffusion (READ) for image-based robot motion planning. Given an image of the scene, READ retrieves an initial motion from a database of image-motion pairs, and uses a diffusion model to refine the motion for the given scene. Unlike prior retrieval-based diffusion models that require long forward-reverse diffusion paths, READ directly diffuses between the source (retrieved) and target motions, resulting in an efficient diffusion path. A second contribution of READ is its use of asymmetric diffusion, whereby it preserves the kinematic feasibility of the generated motion by forward diffusion in a low-dimensional latent space, while achieving high-resolution motion by reverse diffusion in the original task space using cold diffusion. Experimental results on various manipulation tasks demonstrate that READ outperforms state-of-the-art planning methods, while ablation studies elucidate the contributions of asymmetric diffusion. Code: https://anonymous.4open.science/r/READ-C42F