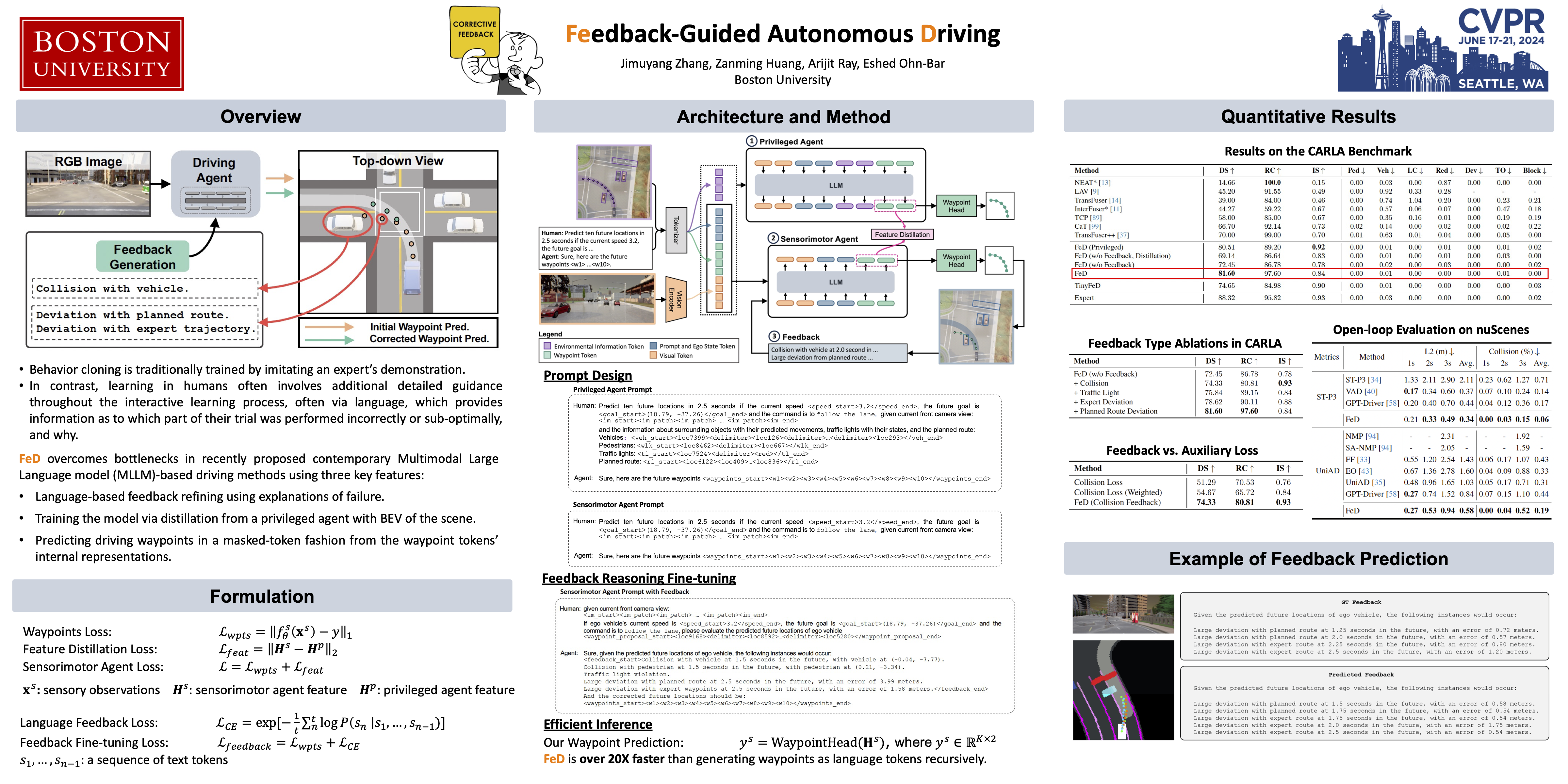
Feedback-Guided Autonomous Driving
 Highlight
Highlight
{kind=link}
Abstract
While behavior cloning has recently emerged as a highly successful paradigm for autonomous driving, humans rarely learn to perform complex tasks, such as driving, via imitation or behavior cloning alone. In contrast, learning in humans often involves additional detailed guidance throughout the interactive learning process, i.e., where feedback, often via language, provides detailed information as to which part of their trial was performed incorrectly or suboptimally and why. Motivated by this observation, we introduce an efficient feedback-based framework for improving behavior-cloning-based training of sensorimotor driving agents. Our key insight is to leverage recent advances in Large Language Models (LLMs) to provide corrective fine-grained feedback regarding the underlying reason behind driving prediction failures. Moreover, our introduced network architecture is efficient, enabling the first sensorimotor end-to-end training and evaluation of LLM-based driving models. The resulting agent achieves state-of-the-art performance in open-loop evaluation on nuScenes, outperforming prior state-of-the-art by over 5.4% and 14.3% in accuracy and collision rate, respectively. In CARLA, our camera-based agent improves by 16.6% in driving score over prior LIDAR-based approaches.