Unsupervised Occupancy Learning from Sparse Point Cloud
 Highlight
Highlight
{kind=link}
Abstract
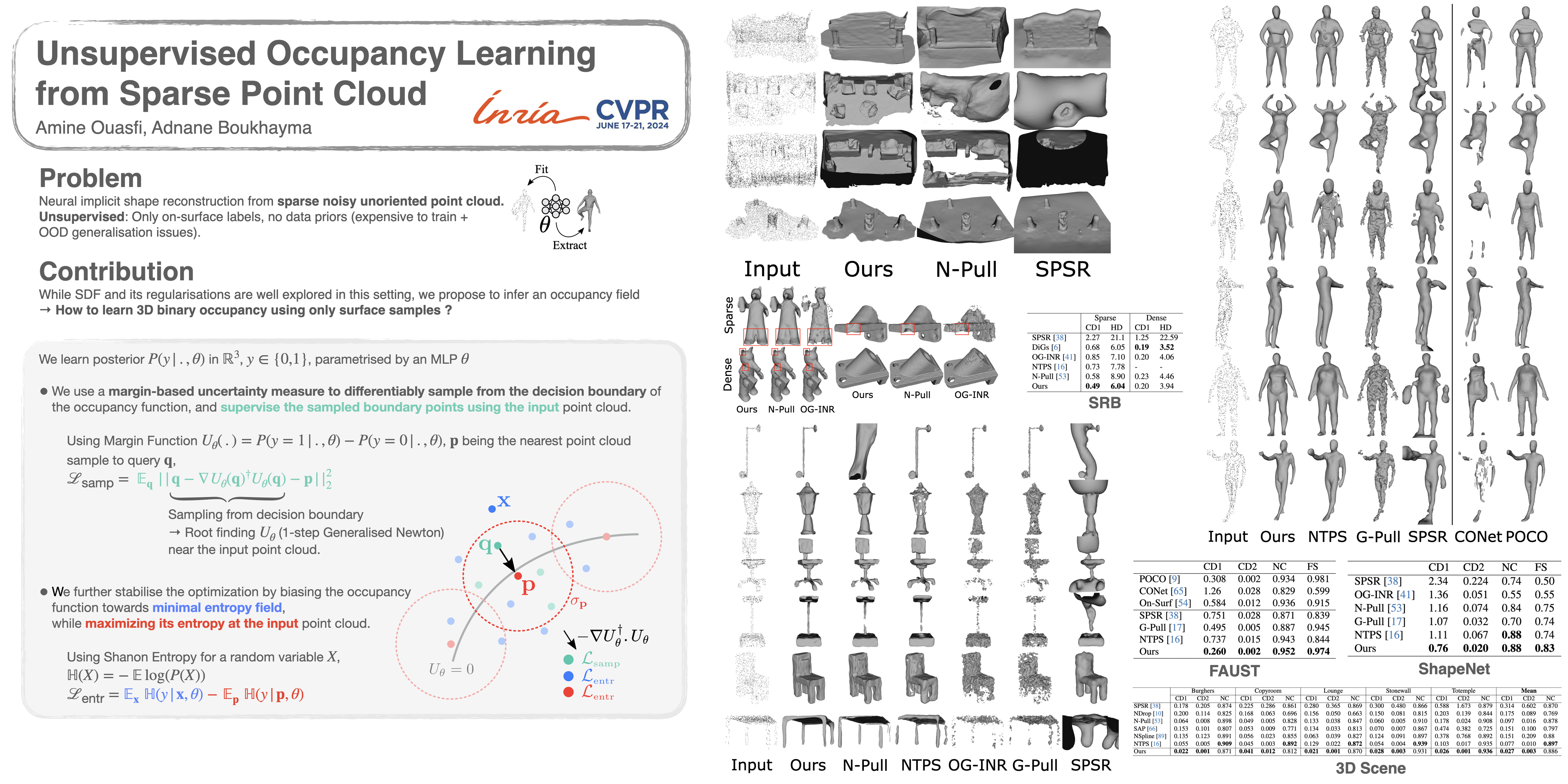
Implicit Neural Representations have gained prominence as a powerful framework for capturing complex data modalities, encompassing a wide range from 3D shapes to images and audio. Within the realm of 3D shape representation, Neural Signed Distance Functions (SDF) have demonstrated remarkable potential in faithfully encoding intricate shape geometry. However, learning SDFs from 3D point clouds in the absence of ground truth supervision remains a very challenging task. In this paper, we propose a method to infer occupancy fields instead of SDFs as they are easier to learn from sparse inputs. We leverage a margin-based uncertainty measure to differentiably sampling from the decision boundary of the occupancy function and supervise the sampled boundary points using the input point cloud. We further stabilise the optimization process at the early stages of the training by biasing the occupancy function towards minimal entropy fields while maximizing its entropy at the input point cloud. Through extensive experiments and evaluations, we illustrate the efficacy of our proposed method, highlighting its capacity to improve implicit shape inference with respect to baselines and the state-of-the-art using synthetic and real data.