LoS: Local Structure-Guided Stereo Matching
Kunhong Li ⋅ Longguang Wang ⋅ Ye Zhang ⋅ Kaiwen Xue ⋅ Shunbo Zhou ⋅ Yulan Guo
2024 Poster
{kind=link}
Abstract
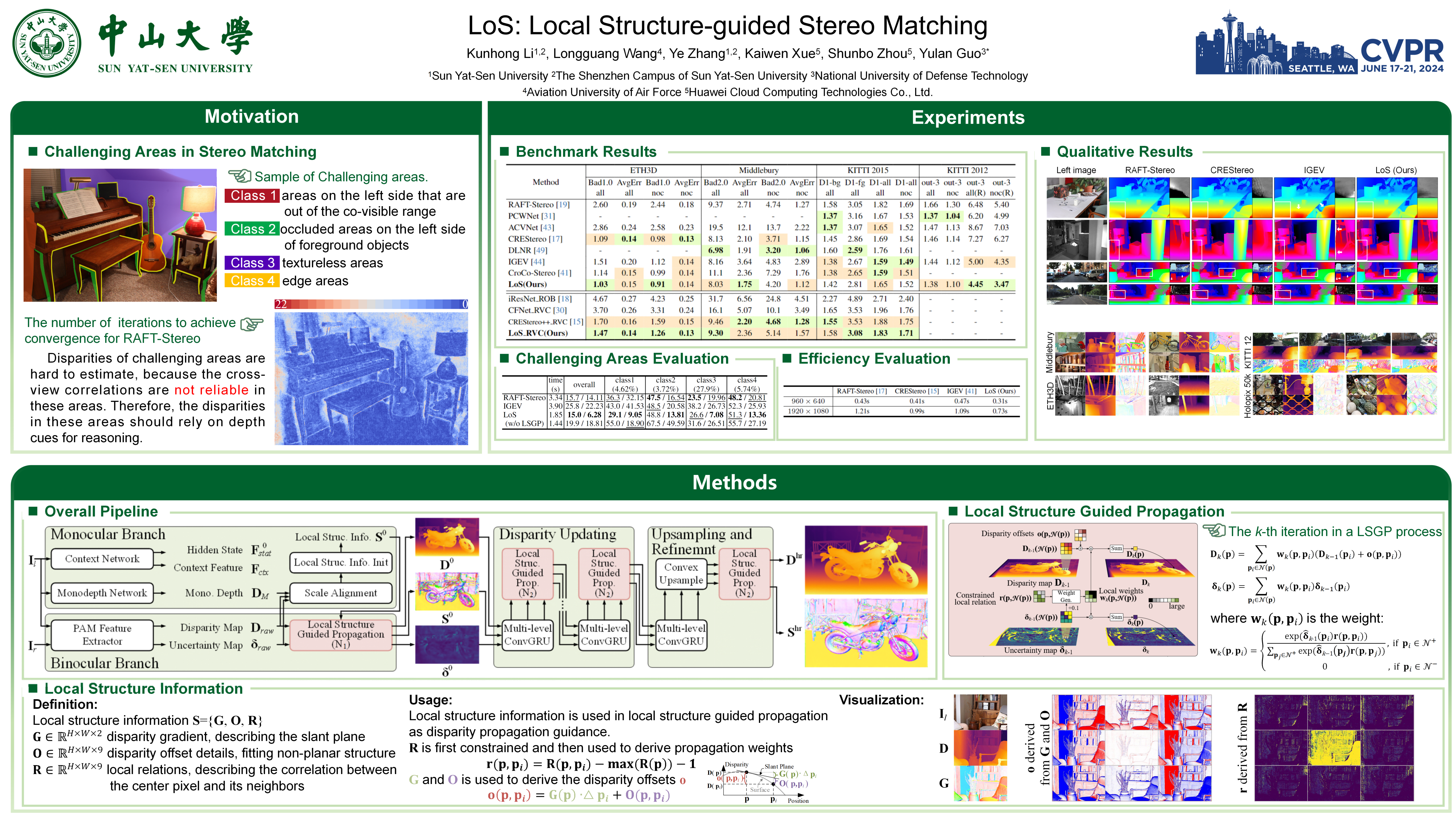
Estimating disparities in challenging areas is difficult and limits the performance of stereo matching models. In this paper, we exploit local structure information (LSI) to enhance stereo matching. Specifically, our LSI comprises a series of key elements, including the slant plane (parameterised by disparity gradients), disparity offset details and neighbouring relations. This LSI empowers our method to effectively handle intricate structures, including object boundaries and curved surfaces. We bootstrap the LSI from monocular depth and subsequently iteratively refine it to better capture the underlying scene geometry constraints. Building upon the LSI, we introduce the Local Structure-Guided Propagation (LSGP), which enhances the disparity initialization, optimization, and refinement processes. By combining LSGP with a Gated Recurrent Unit (GRU), we present our novel stereo matching method, referred to as $\textbf{Lo}$cal $\textbf{S}$tructure-guided stereo matching (LoS). Remarkably, LoS achieves top-ranking results on four widely recognized public benchmark datasets (ETH3D, Middlebury, KITTI 15 & 12), demonstrating the superior capabilities of our proposed model.
Chat is not available.
Successful Page Load