View From Above: Orthogonal-View aware Cross-view Localization
{kind=link}
Abstract
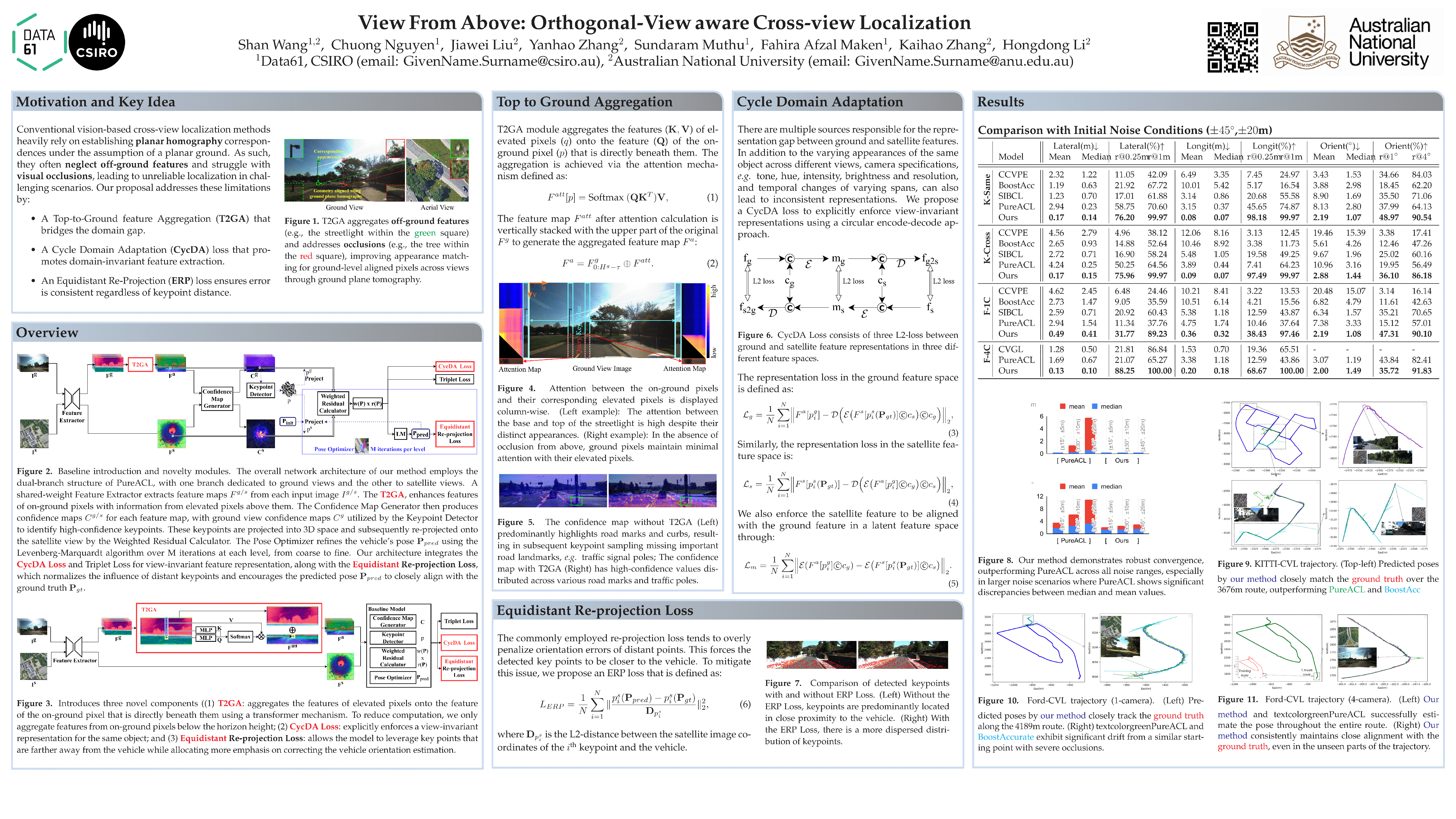
This paper presents a novel aerial-to-ground feature aggregation strategy, tailored for the task of cross-view image-based geo-localization. Conventional vision-based methods heavily rely on matching ground-view image features with a pre-recorded image database, often through establishing planar homography correspondences via a planar ground assumption. As such, they tend to ignore features that are off-ground and not suited for handling visual occlusions, leading to unreliable localization in challenging scenarios. We propose a Top-to-Ground Aggregation (T2GA) module that capitalizes aerial orthographic views to aggregate features down to the ground level, leveraging reliable off-ground information to improve feature alignment. Furthermore, we introduce a Cycle Domain Adaptation (CycDA) loss that ensures feature extraction robustness across domain changes. Additionally, an Equidistant Re-projection (ERP) loss is introduced to equalize the impact of all keypoints on orientation error, leading to a more extended distribution of keypoints which benefits orientation estimation. On both KITTI and Ford Multi-AV datasets, our method consistently achieves the lowest mean longitudinal and lateral translations across different settings and obtains the smallest orientation error when the initial pose is less accurate, a more challenging setting. Further, it can complete an entire route through continual vehicle pose estimation with initial vehicle pose given only at the starting point.