Robust Self-calibration of Focal Lengths from the Fundamental Matrix
{kind=link}
Abstract
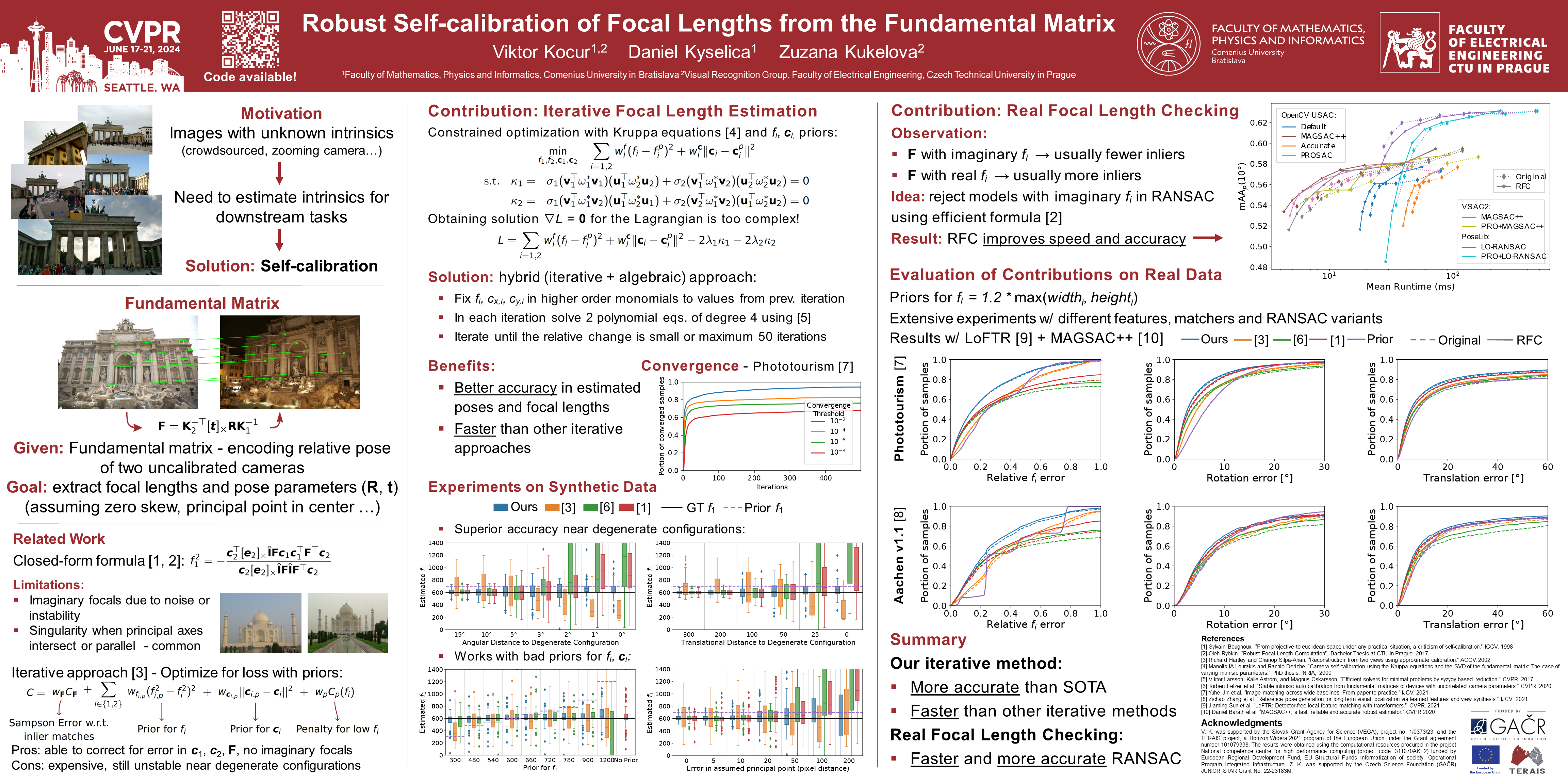
The problem of self-calibration of two cameras from a given fundamental matrix is one of the basic problems in geometric computer vision. Under the assumption of known principal points and square pixels, the Bougnoux formula offers a means to compute the two unknown focal lengths. However, in many practical situations, the formula yields inaccurate results due to commonly occurring singularities. Moreover, the estimates are sensitive to noise in the computed fundamental matrix and to the assumed positions of the principal points. In this paper, we therefore propose an efficient and robust iterative method to estimate the focal lengths along with the principal points of the cameras given a fundamental matrix and priors for the estimated camera intrinsics. In addition, we study a computationally efficient check of models generated within RANSAC that improves the accuracy of the estimated models while reducing the total computational time. Extensive experiments on real and synthetic data show that our iterative method brings significant improvements in terms of the accuracy of the estimated focal lengths over the Bougnoux formula and other state-of-the-art methods, even when relying on inaccurate priors. The code for the methods and experiments is available at https://github.com/kocurvik/robustselfcalibration