Local-consistent Transformation Learning for Rotation-invariant Point Cloud Analysis
{kind=link}
Abstract
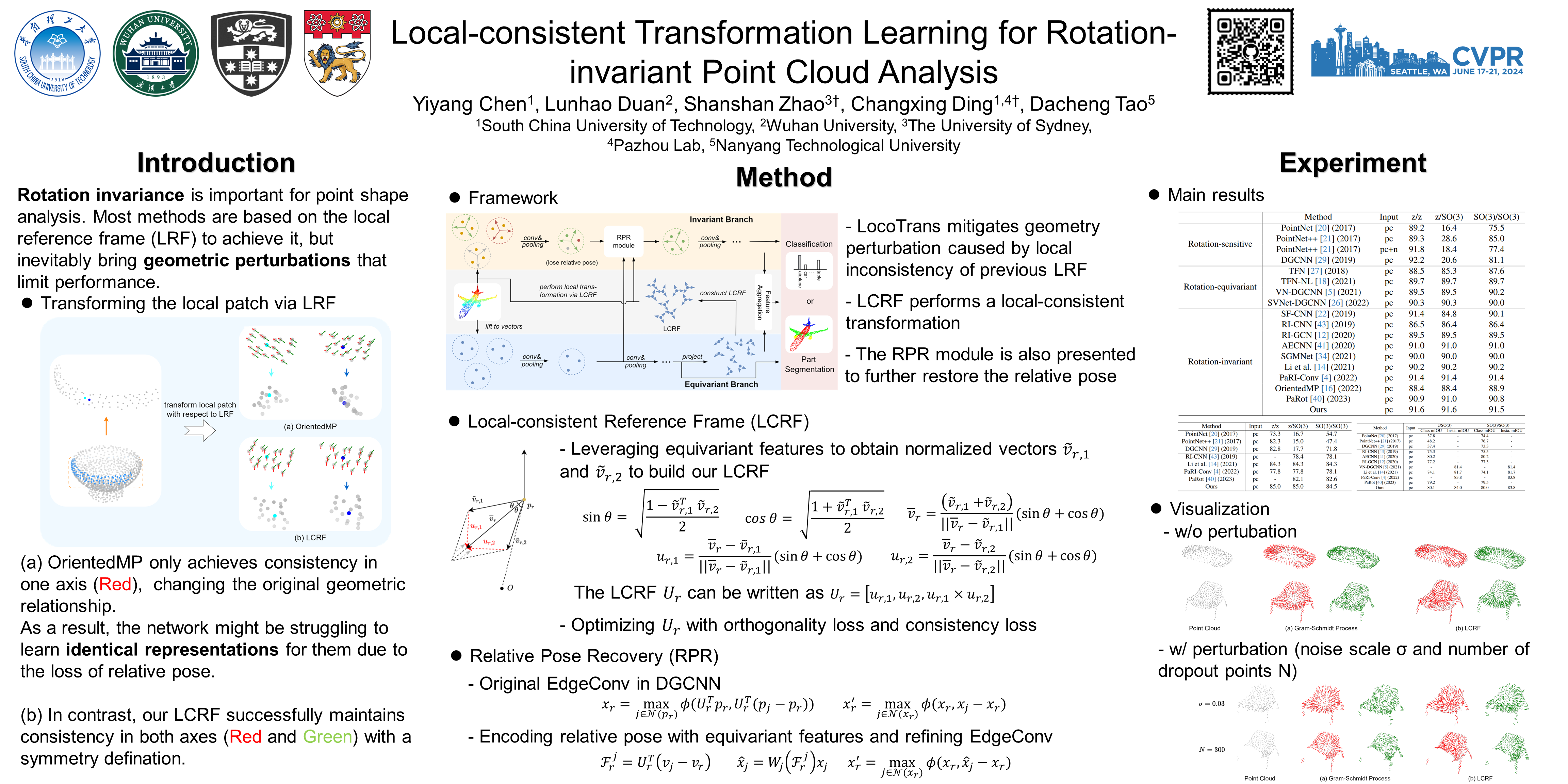
Rotation invariance is an important requirement for point shape analysis. To achieve this, current state-of-the-art methods attempt to construct the local rotation-invariant representation through learning or defining the local reference frame (LRF). Although efficient, these LRF-based methods suffer from perturbation of local geometric relations, resulting in suboptimal local rotation invariance. To alleviate this issue, we propose a Local-consistent Transformation (LocoTrans) learning strategy. Specifically, we first construct the local-consistent reference frame (LCRF) by considering the symmetry of the two axes in LRF. In comparison with previous LRFs, our LCRF is able to preserve local geometric relationships better through performing local-consistent transformation. However, as the consistency only exists in local regions, the relative pose information is still lost in the intermediate layers of the network. We mitigate such a relative pose issue by developing a relative pose recovery (RPR) module. RPR aims to restore the relative pose between adjacent transformed patches. Equipped with LCRF and RPR, our LocoTrans is capable of learning local-consistent transformation and preserving local geometry, which benefits rotation invariance learning. Competitive performance under arbitrary rotations on both shape classification and part segmentation tasks and ablations can demonstrate the effectiveness of our method. Code will be available publicly at https://github.com/wdttt/LocoTrans.