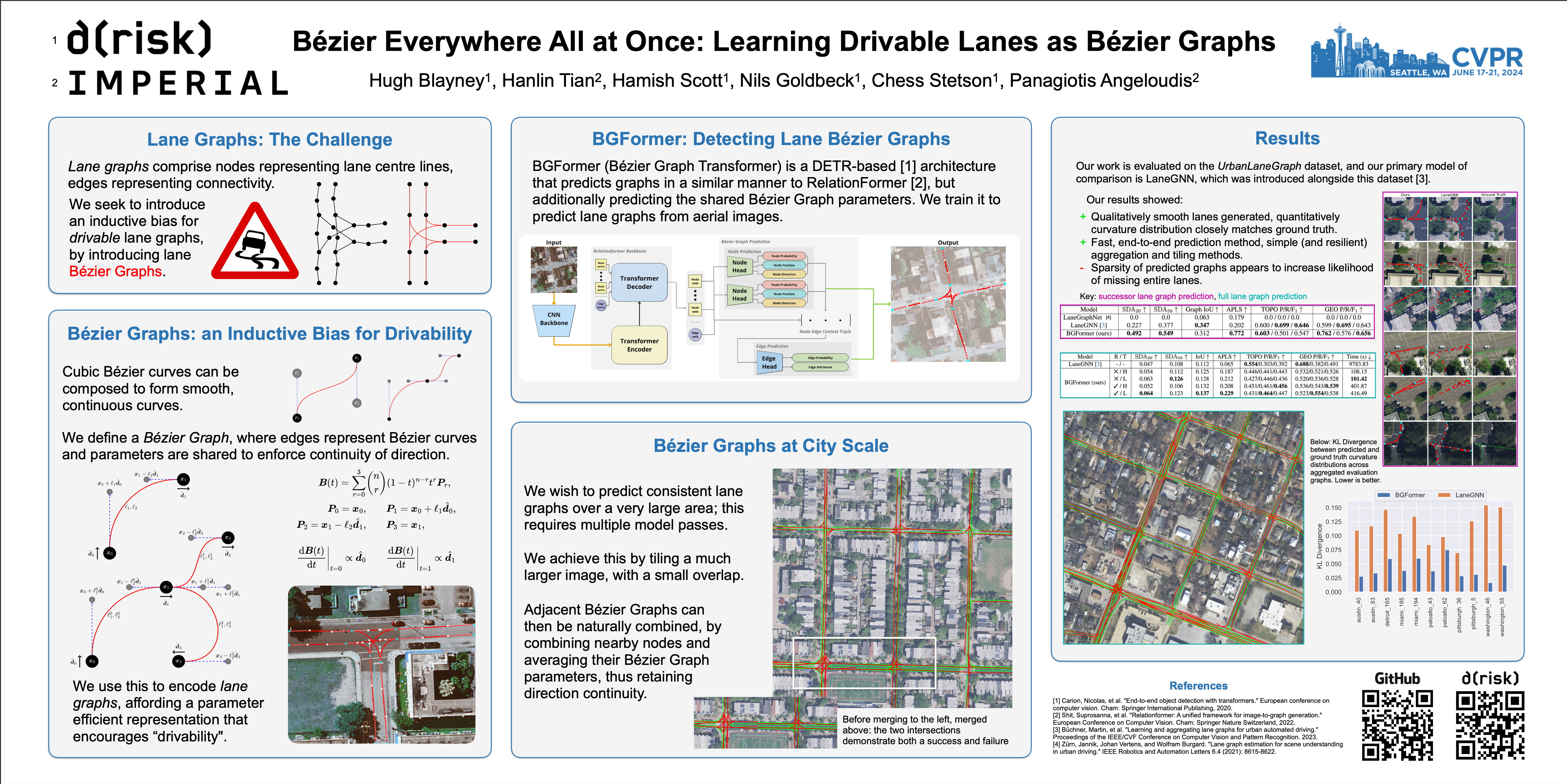
Bézier Everywhere All at Once: Learning Drivable Lanes as Bézier Graphs
{kind=link}
Abstract
Knowledge of lane topology is a core problem in autonomous driving. Aerial imagery can provide high resolution, quickly updatable lane source data but detecting lanes from such data has so far been an expensive manual process or, where automated solutions exist, undrivable and requiring of downstream processing. We propose a method for large-scale lane topology extraction from aerial imagery while ensuring that the resulting lanes are realistic and drivable by introducing a novel Bézier Graph shared parameterisation of Bézier curves. We develop a transformer-based model to predict these Bézier Graphs from input aerial images, demonstrating competitive results on the UrbanLaneGraph dataset. We demonstrate that our method generates realistic lane graphs which require both minimal input, and minimal downstream processing. We make our code publicly available at https://github.com/driskai/BGFormer