RTracker: Recoverable Tracking via PN Tree Structured Memory
{kind=link}
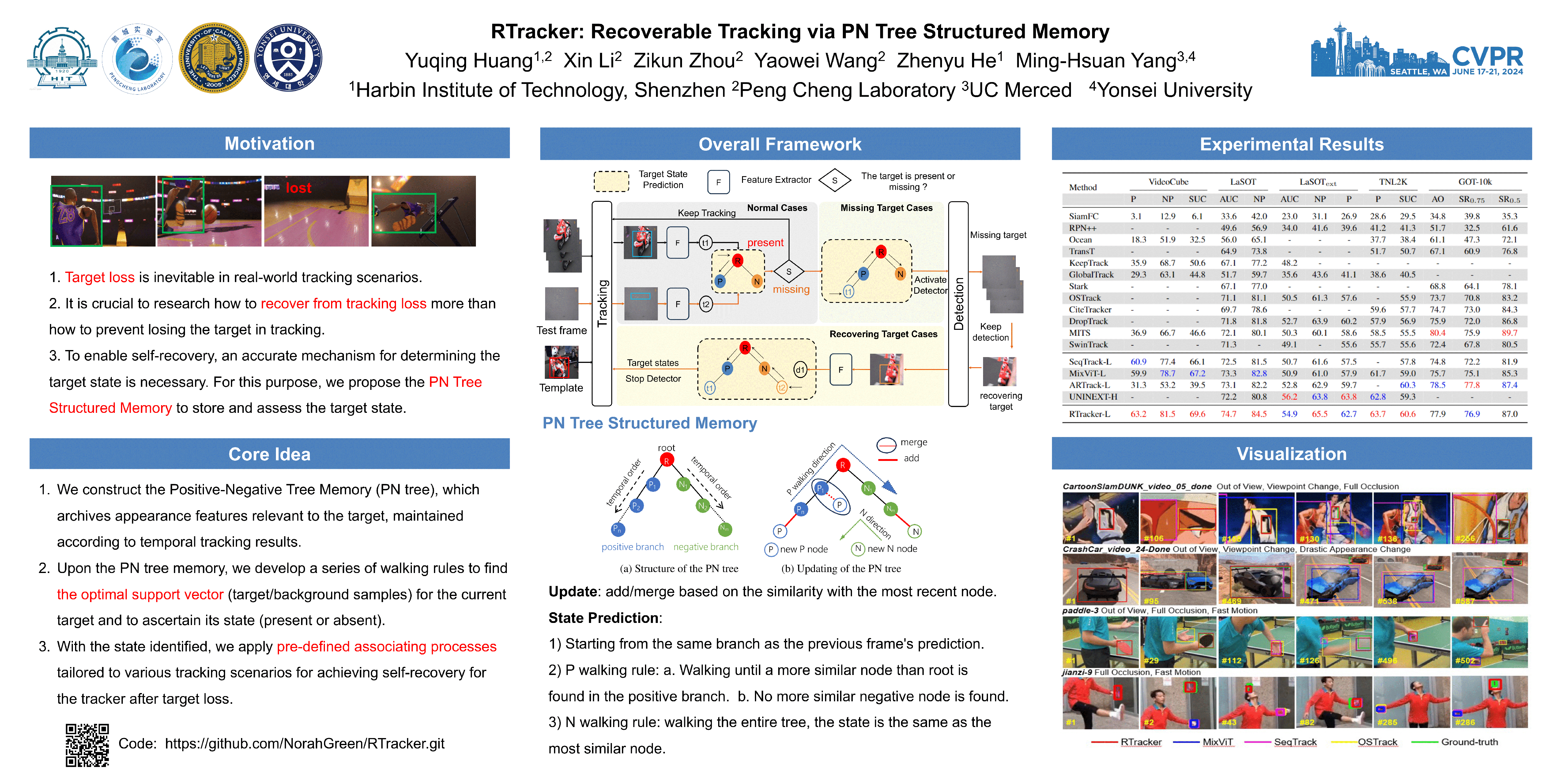
Abstract
Existing tracking methods mainly focus on learning better target representation or developing more robust prediction models to improve tracking performance. While tracking performance has significantly improved, the target loss issue occurs frequently due to tracking failures, complete occlusion, or out-of-view situations. However, considerably less attention is paid to the self-recovery issue of tracking methods, which is crucial for practical applications. To this end, we propose a recoverable tracking framework, RTracker, that uses a tree-structured memory to dynamically associate a tracker and a detector to enable self-recover ability. Specifically, we propose a Positive-Negative Tree-structured memory to chronologically store and maintain positive and negative target samples. Upon the PN tree memory, we develop corresponding walking rules for determining the state of the target and define a set of control flows to unite the tracker and the detector in different tracking scenarios. Our core idea is to use the support samples of positive and negative target categories to establish a relative distance-based criterion for a reliable assessment of target loss. The favorable performance in comparison against the state-of-the-art methods on numerous challenging benchmarks demonstrates the effectiveness of the proposed algorithm. All the source code and trained models will be released.