Learning to Navigate Efficiently and Precisely in Real Environments
{kind=link}
Abstract
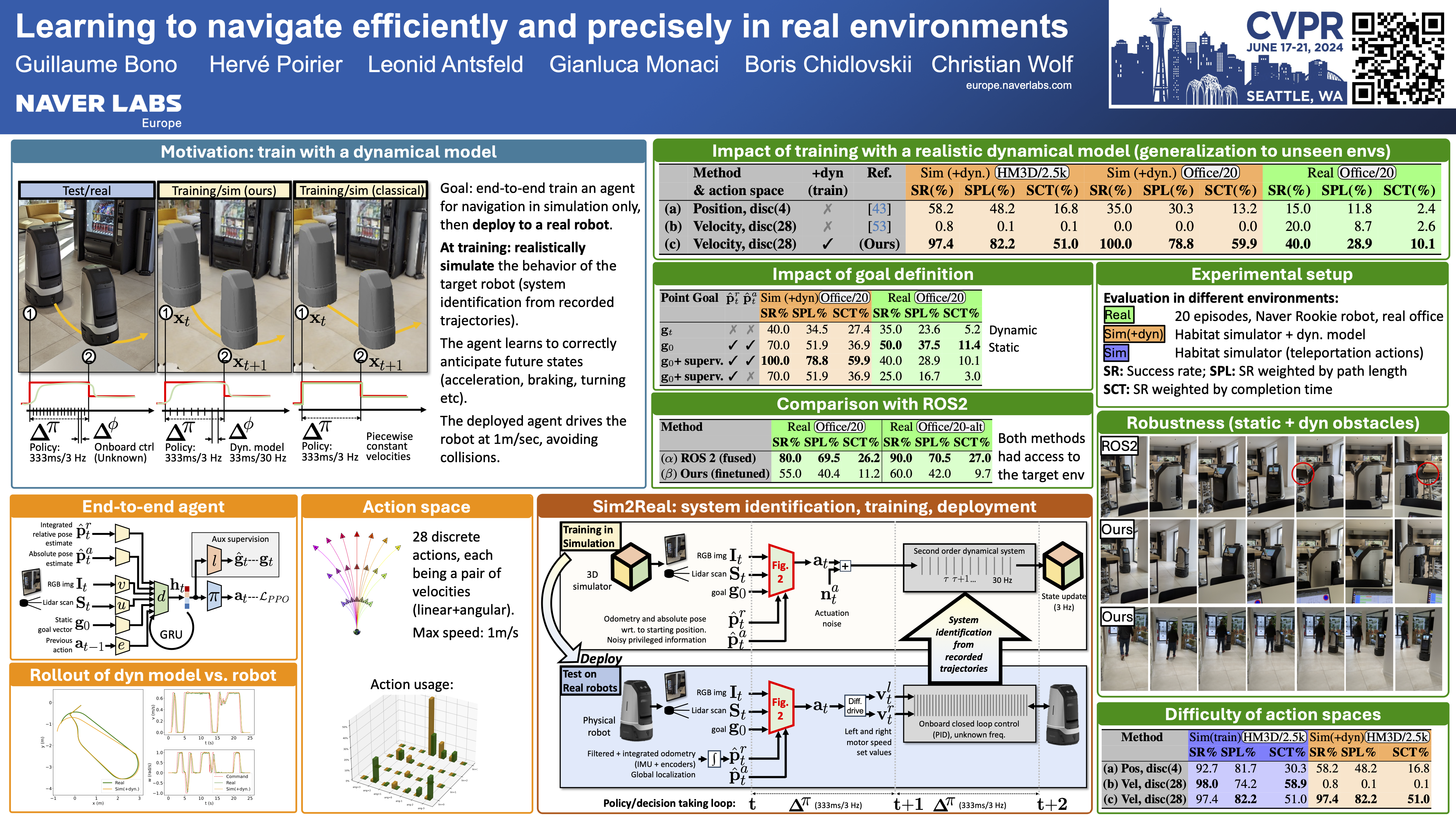
In the context of autonomous navigation of terrestrial robots, the creation of realistic models for agent dynamics and sensing is a widespread habit in the robotics literature and in commercial applications, where they are used for model based control and/or for localization and mapping. The more recent Embodied AI literature, on the other hand, focuses on modular or end-to-end agents trained in simulators like Habitat or AI-Thor, where the emphasis is put on photo-realistic rendering and scene diversity, but high-fidelity robot motion is assigned a less privileged role. The resulting sim2real gap significantly impacts transfer of the trained models to real robotic platforms.In this work we explore end-to-end training of agents in simulation in settings which minimize the sim2real gap both, in sensing and in actuation. Our agent directly predicts (discretized) velocity commands, which are maintained through closed-loop control in the real robot. The behavior of the real robot (including the underlying low-level controller) is identified and simulated in a modified Habitat simulator. Noise models for odometry and localization further contribute in lowering the sim2real gap. We evaluate on real navigation scenarios, explore different localization and point goal calculation methods and report significant gains in performance and robustness compared to prior work.