Exploring Orthogonality in Open World Object Detection
{kind=link}
Abstract
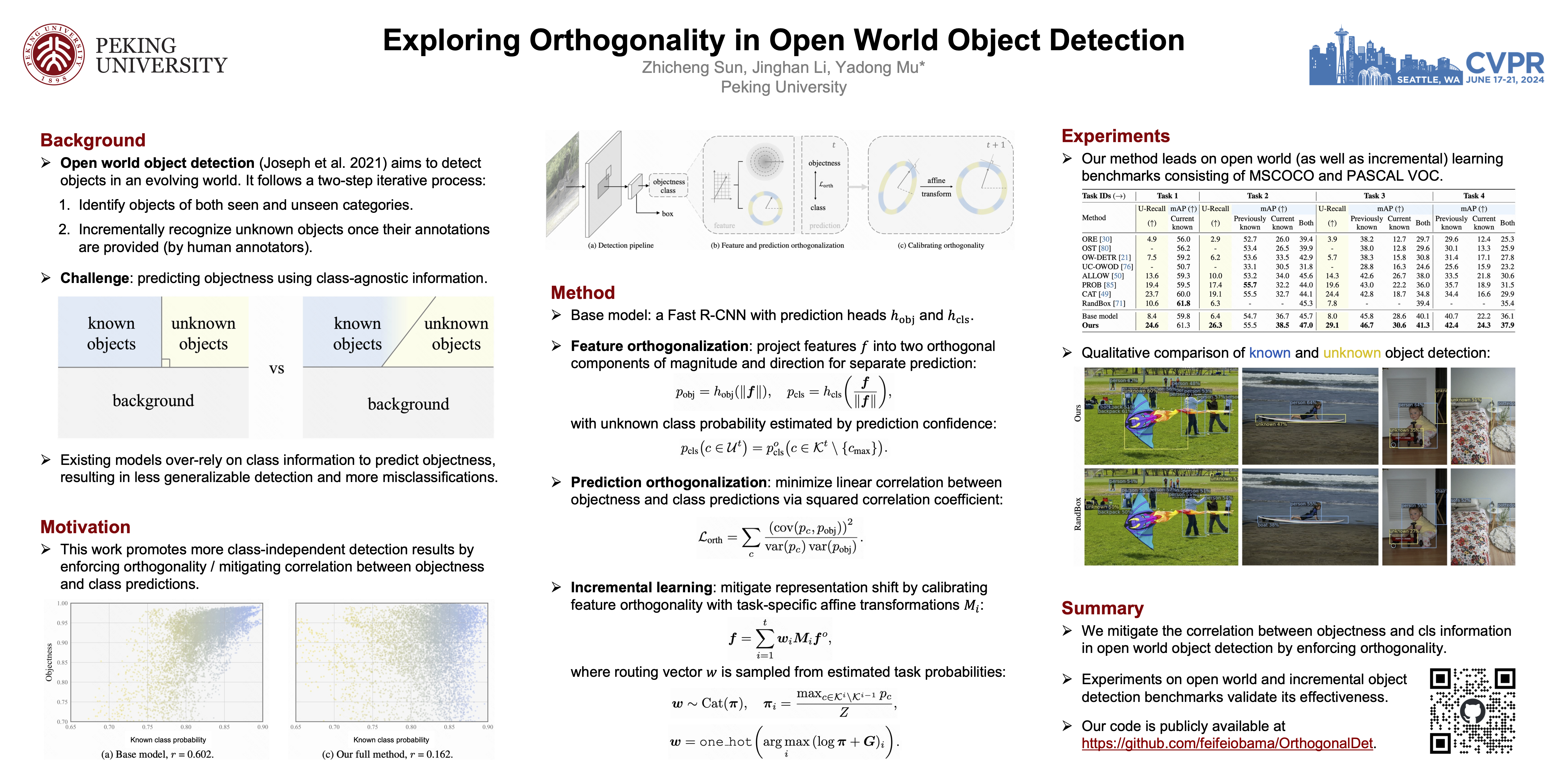
Open world object detection aims to identify objects of unseen categories and incrementally recognize them once their annotations are provided. In distinction to the traditional paradigm that is limited to predefined categories, this setting promises a continual and generalizable way of estimating objectness using class-agnostic information. However, achieving such decorrelation between objectness and class information proves challenging. Without explicit consideration, existing methods usually exhibit low recall on unknown objects and can misclassify them into known classes. To address this problem, we exploit three levels of orthogonality in the detection process: First, the objectness and classification heads are disentangled by operating on separate sets of features that are orthogonal to each other in a devised polar coordinate system. Secondly, a prediction decorrelation loss is introduced to guide the detector towards more general and class-independent prediction. Furthermore, we propose a calibration scheme that helps maintain orthogonality throughout the training process to mitigate catastrophic interference and facilitate incremental learning of previously unseen objects. Our method is comprehensively evaluated on open world and incremental object detection benchmarks, demonstrating its effectiveness in detecting both known and unknown objects. Code and models are available at https://github.com/feifeiobama/OrthogonalDet.