Rethinking Human Motion Prediction with Symplectic Integral
{kind=link}
Abstract
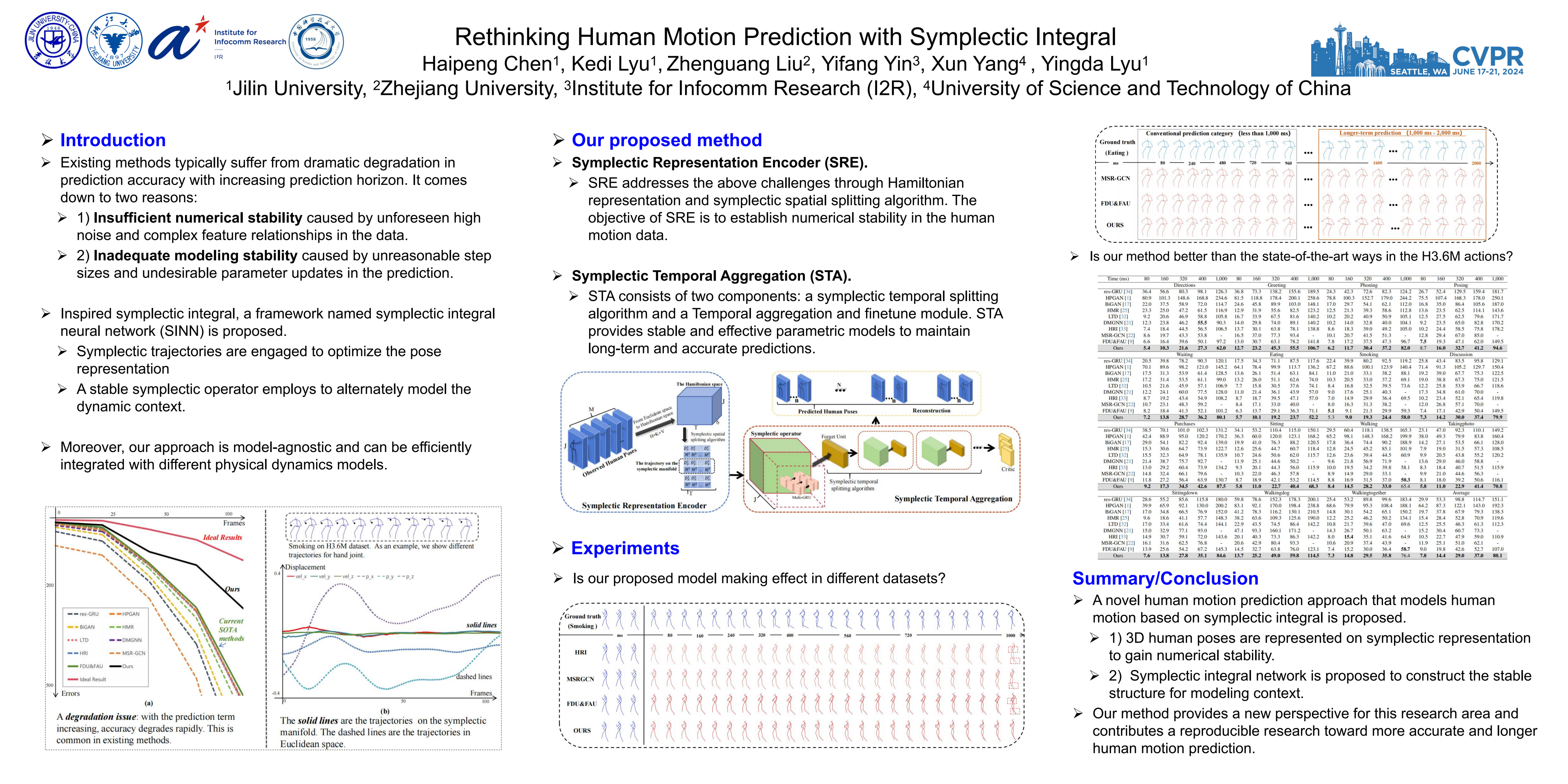
Long-term and accurate forecasting is the long-standing pursuit of the human motion prediction task. Existing methods typically suffer from dramatic degradation in prediction accuracy with the increasing prediction horizon. It comes down to two reasons: 1) Insufficient numerical stability. Unforeseen high noise and complex feature relationships in the data. 2) Inadequate modeling stability. Unreasonable step sizes and undesirable parameter updates in the prediction.In this paper, we design a novel and symplectic integral-inspired framework named symplectic integral neural network (SINN), which engages symplectic trajectories to optimize the pose representation and employs a stable symplectic operator to alternately model the dynamic context. Specifically, we design a Symplectic Representation Encoder that performs on enhanced human pose representation to obtain trajectories on the symplectic manifold, ensuring numerical stability based on Hamiltonian mechanics and symplectic spatial splitting algorithm. We further present the Symplectic Temporal Aggregation module in the light of the symplectic temporal splitting algorithm, which splits the long-term prediction into multiple accurate short-term predictions generated by a symplectic operator to secure modeling stability. Moreover, our approach is model-agnostic and can be efficiently integrated with different physical dynamics models.The experimental results demonstrate that our method achieves the new state-of-the-art, outperforming existing methods by large margins: 20.1% on Human3.6M, 16.7% on CUM Mocap, and 10.2% on 3DPW. Our code is anonymously released.